Development of a 15-Degree-of-Freedom Bionic Hand with Cable-Driven Transmission and Distributed Actuation
作者: Haoqi Han, Yi Yang, Yifei Yu, Yixuan Zhou, Xiaohan Zhu, Hesheng Wang
分类: cs.RO
发布日期: 2025-12-04
💡 一句话要点
提出一种15自由度仿生灵巧手,采用缆索驱动和分布式驱动,适用于复杂操作任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 仿生手 灵巧手 缆索驱动 分布式驱动 机器人操作 多自由度 肌腱驱动
📋 核心要点
- 现有机器人手在自由度、尺寸和执行器数量之间难以平衡,限制了其灵巧性和实用性。
- 该论文提出一种新型缆索驱动的仿生手,通过分布式驱动策略,减少电机数量并提高运动性能。
- 实验结果表明,该仿生手具有出色的灵巧性和抓握能力,重量仅为1.4kg,具有实际应用潜力。
📝 摘要(中文)
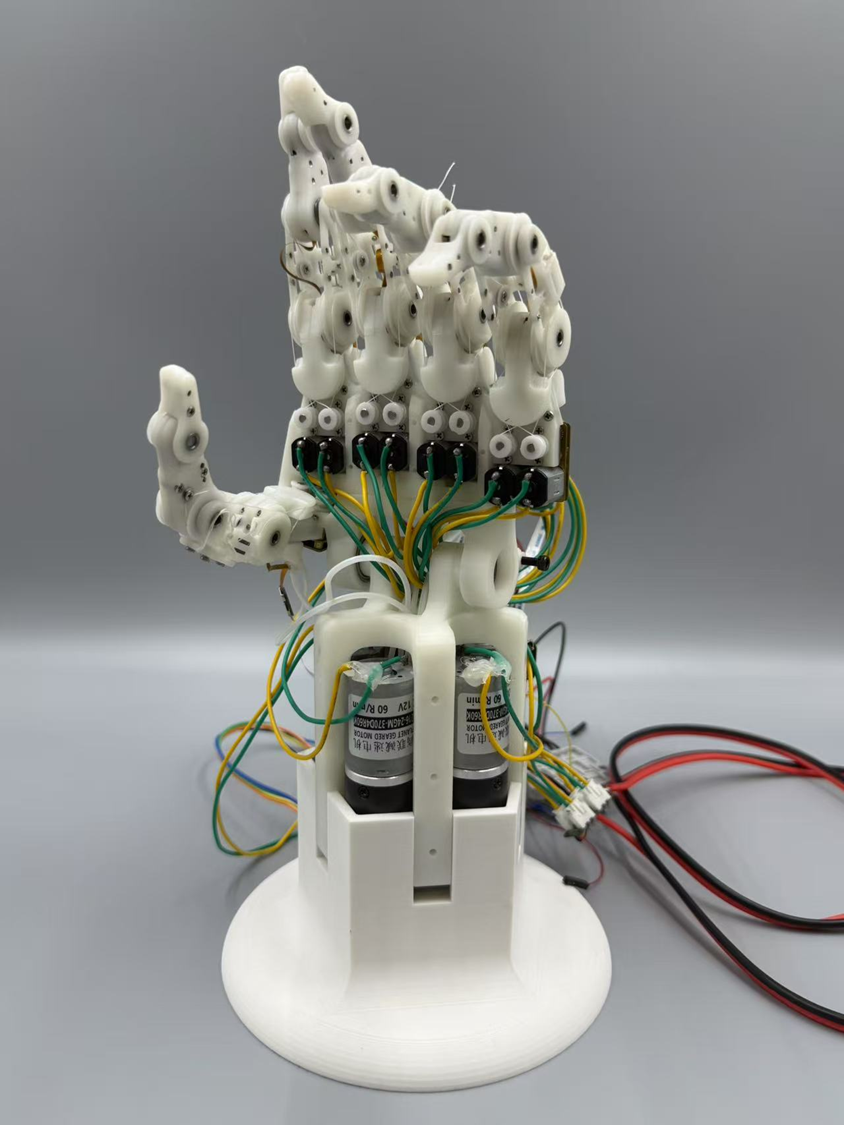
在机器人手的研究中,如何在保持与人手一致的尺寸和自由度的同时,最大限度地减少执行器的数量是一个根本性的挑战。受人手运动学配置和肌肉分布策略的生物启发,本文提出了一种新型的15自由度灵巧机器人手,并详细分析了其机械结构、电气系统和控制系统。该仿生手采用了一种新的肌腱驱动机制,显著减少了传统肌腱驱动系统所需的电机数量,同时提高了运动性能并简化了机械结构。该设计在手臂中集成了五个电机以提供强大的抓握力,并在手掌中安装了十个小型电机以支持精细的操作任务。此外,还开发了相应的关节传感和电机驱动电气系统,以确保有效的控制和反馈。整个系统重量仅为1.4kg,兼具轻量化和高性能的特点。通过实验,该仿生手表现出卓越的灵巧性和强大的抓握能力,展示了在机器人操作任务中的巨大潜力。
🔬 方法详解
问题定义:现有机器人手设计面临的挑战是在保持人手相似的尺寸和自由度的前提下,如何减少执行器的数量。传统的肌腱驱动系统通常需要大量的电机,导致体积和重量增加,控制复杂性提高,限制了其在实际应用中的可行性。因此,需要设计一种结构紧凑、控制高效且具有高灵巧性的机器人手。
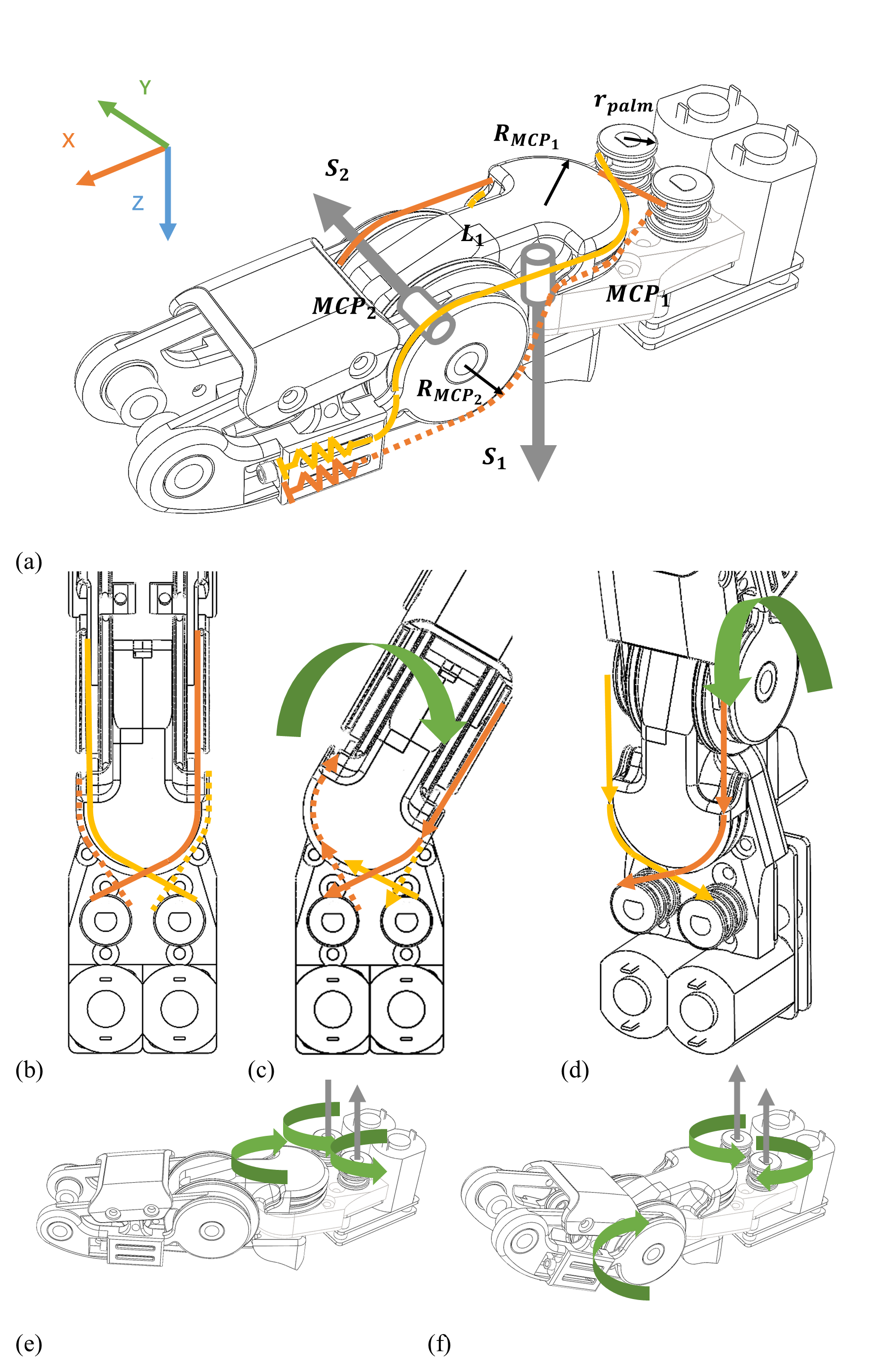
核心思路:该论文的核心思路是借鉴人手的运动学配置和肌肉分布策略,采用一种新型的缆索驱动机制和分布式驱动策略。通过将电机分布在手臂和手掌中,分别负责提供抓握力和精细操作,从而在减少电机数量的同时,提高运动性能和简化机械结构。
技术框架:该机器人手的整体架构包括机械结构、电气系统和控制系统三个主要部分。机械结构采用15自由度设计,模仿人手的运动范围。电气系统包括关节传感器和电机驱动器,用于实现精确的控制和反馈。控制系统负责协调各个电机的运动,实现各种抓握和操作任务。
关键创新:该论文最重要的技术创新点在于新型的缆索驱动机制和分布式驱动策略。传统的肌腱驱动系统通常需要为每个关节配备一个电机,而该设计通过巧妙的缆索布局,减少了电机数量。同时,将电机分布在手臂和手掌中,实现了抓握力和精细操作的解耦,提高了控制效率。
关键设计:该机器人手采用五个电机安装在手臂中,负责提供强大的抓握力,而十个小型电机安装在手掌中,用于支持精细的操作任务。这种分布式驱动策略允许系统在保证抓握力的同时,实现高精度的手指运动。此外,关节传感器的选择和电机驱动器的设计也对系统的性能至关重要,需要根据具体的应用场景进行优化。
🖼️ 关键图片

📊 实验亮点
该仿生手重量仅为1.4kg,在实现15个自由度的同时,显著减少了电机数量。实验结果表明,该机器人手具有卓越的灵巧性和强大的抓握能力,能够完成各种复杂的抓握和操作任务。与传统的机器人手相比,该设计在体积、重量和控制复杂性方面都具有明显的优势,展示了其在实际应用中的巨大潜力。
🎯 应用场景
该研究成果可应用于各种需要灵巧操作的场景,如工业自动化、医疗康复、远程操作和人机协作等。在工业自动化中,该机器人手可以用于执行复杂的装配和抓取任务。在医疗康复领域,可以作为假肢或康复训练设备。在远程操作中,可以用于危险环境下的操作任务。未来,该技术有望进一步发展,实现更高级的智能操作和人机交互。
📄 摘要(原文)
In robotic hand research, minimizing the number of actuators while maintaining human-hand-consistent dimensions and degrees of freedom constitutes a fundamental challenge. Drawing bio-inspiration from human hand kinematic configurations and muscle distribution strategies, this work proposes a novel 15-DoF dexterous robotic hand, with detailed analysis of its mechanical architecture, electrical system, and control system. The bionic hand employs a new tendon-driven mechanism, significantly reducing the number of motors required by traditional tendon-driven systems while enhancing motion performance and simplifying the mechanical structure. This design integrates five motors in the forearm to provide strong gripping force, while ten small motors are installed in the palm to support fine manipulation tasks. Additionally, a corresponding joint sensing and motor driving electrical system was developed to ensure efficient control and feedback. The entire system weighs only 1.4kg, combining lightweight and high-performance features. Through experiments, the bionic hand exhibited exceptional dexterity and robust grasping capabilities, demonstrating significant potential for robotic manipulation tasks.