Bayesian Optimization for Automatic Tuning of Torque-Level Nonlinear Model Predictive Control
作者: Gabriele Fadini, Deepak Ingole, Tong Duy Son, Alisa Rupenyan
分类: cs.RO, cs.AI, eess.SY
发布日期: 2025-12-03
备注: 6 pages, 7 figures, 3 tables
💡 一句话要点
提出基于贝叶斯优化的力矩级非线性模型预测控制自动调参框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 贝叶斯优化 非线性模型预测控制 数字孪生 机器人控制 自动调参
📋 核心要点
- 现有机器人控制器的参数整定依赖手动调整,耗时且难以达到最优,尤其是在高维参数空间中。
- 利用数字孪生技术,结合稀疏轴对齐子空间贝叶斯优化(SAASBO),自动搜索最优的nMPC参数配置。
- 实验表明,该方法在仿真和真实机器人上均能显著提升轨迹跟踪性能,并降低求解时间。
📝 摘要(中文)
本文提出了一种基于力矩的非线性模型预测控制(nMPC)的自动调参框架,该MPC作为实时控制器,用于优化关节力矩指令。利用高维贝叶斯优化(BO)技术,特别是具有数字孪生(DT)的稀疏轴对齐子空间(SAASBO),优化MPC参数,包括成本函数权重和低层控制器增益,从而在UR10e机器人手臂上实现精确的末端执行器轨迹实时跟踪。仿真模型能够有效探索高维参数空间,并确保安全地转移到硬件。仿真结果表明,与手动调整的参数相比,跟踪性能显著提高(+41.9%),求解时间减少(-2.5%)。此外,在真实机器人上的实验验证也遵循了这一趋势(改进+25.8%),强调了数字孪生支持的自动化参数优化对于机器人操作的重要性。
🔬 方法详解
问题定义:论文旨在解决力矩级非线性模型预测控制(nMPC)中参数手动调整的问题。手动调整MPC的成本函数权重和低层控制器增益非常耗时,且难以在高维参数空间中找到最优解,导致机器人轨迹跟踪性能受限。
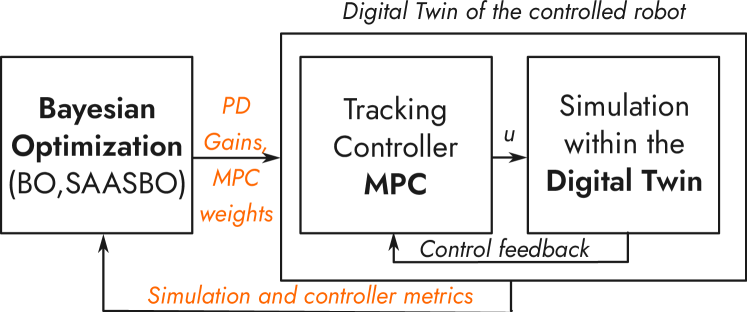
核心思路:论文的核心思路是利用贝叶斯优化(BO)算法自动搜索最优的MPC参数。通过构建机器人的数字孪生模型,可以在仿真环境中高效地探索参数空间,并安全地将优化结果迁移到真实机器人上。采用稀疏轴对齐子空间(SAASBO)方法,能够更有效地处理高维参数空间,加速优化过程。
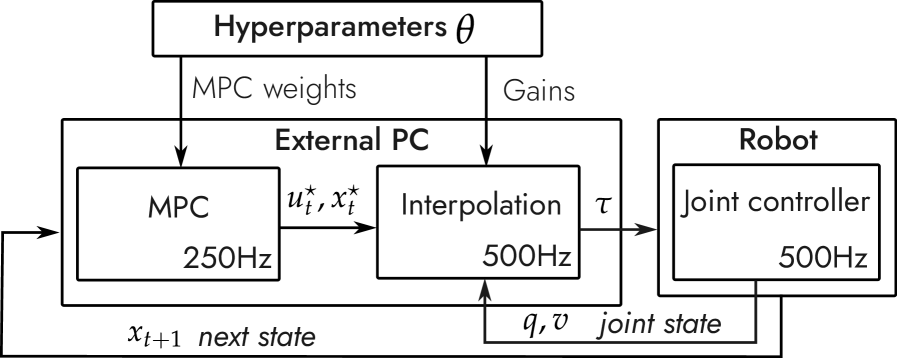
技术框架:整体框架包括以下几个主要模块:1) 数字孪生模型:构建UR10e机器人的精确仿真模型,用于评估不同参数配置下的MPC性能。2) 贝叶斯优化器:使用SAASBO算法,根据仿真结果迭代地选择下一组参数进行评估。3) 非线性模型预测控制器(nMPC):基于力矩的nMPC作为实时控制器,接收优化后的参数,并生成关节力矩指令。4) 实验验证:将优化后的参数部署到真实UR10e机器人上,验证其轨迹跟踪性能。
关键创新:该论文的关键创新在于将数字孪生技术与高维贝叶斯优化相结合,实现了nMPC参数的自动整定。SAASBO算法能够有效地处理高维参数空间,加速优化过程。此外,通过数字孪生模型,可以在仿真环境中安全地探索参数空间,避免了在真实机器人上进行危险实验。
关键设计:论文中关键的设计包括:1) 成本函数的设计:成本函数用于评估MPC的性能,包括轨迹跟踪误差和控制力矩的惩罚项。2) SAASBO算法的参数设置:SAASBO算法需要设置一些参数,例如子空间的大小和探索策略。3) 数字孪生模型的精度:数字孪生模型的精度直接影响优化结果的有效性,需要仔细校准。
🖼️ 关键图片

📊 实验亮点
实验结果表明,与手动调整的参数相比,该方法在仿真环境中实现了+41.9%的轨迹跟踪性能提升和-2.5%的求解时间减少。在真实UR10e机器人上的实验验证也显示了+25.8%的轨迹跟踪性能提升,验证了数字孪生支持的自动化参数优化方法的有效性。
🎯 应用场景
该研究成果可广泛应用于机器人自动化领域,尤其是在需要高精度轨迹跟踪的场景中,如工业装配、喷涂、焊接等。通过自动调整控制器参数,可以显著提高机器人性能,降低人工调试成本,并加速机器人系统的部署。未来,该方法可以扩展到其他类型的机器人和更复杂的控制任务中。
📄 摘要(原文)
This paper presents an auto-tuning framework for torque-based Nonlinear Model Predictive Control (nMPC), where the MPC serves as a real-time controller for optimal joint torque commands. The MPC parameters, including cost function weights and low-level controller gains, are optimized using high-dimensional Bayesian Optimization (BO) techniques, specifically Sparse Axis-Aligned Subspace (SAASBO) with a digital twin (DT) to achieve precise end-effector trajectory real-time tracking on an UR10e robot arm. The simulation model allows efficient exploration of the high-dimensional parameter space, and it ensures safe transfer to hardware. Our simulation results demonstrate significant improvements in tracking performance (+41.9%) and reduction in solve times (-2.5%) compared to manually-tuned parameters. Moreover, experimental validation on the real robot follows the trend (with a +25.8% improvement), emphasizing the importance of digital twin-enabled automated parameter optimization for robotic operations.