Cross-embodied Co-design for Dexterous Hands
作者: Kehlani Fay, Darin Anthony Djapri, Anya Zorin, James Clinton, Ali El Lahib, Hao Su, Michael T. Tolley, Sha Yi, Xiaolong Wang
分类: cs.RO, cs.LG
发布日期: 2025-12-03 (更新: 2025-12-30)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出灵巧手协同设计框架,实现任务导向的形态与控制策略优化
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 灵巧手 协同设计 机器人控制 形态优化 强化学习
📋 核心要点
- 现有灵巧手设计与控制相互独立,缺乏针对特定任务的协同优化方法,难以充分发挥灵巧操作的潜力。
- 提出一种协同设计框架,同时优化机械手的形态和控制策略,实现任务导向的灵巧操作能力。
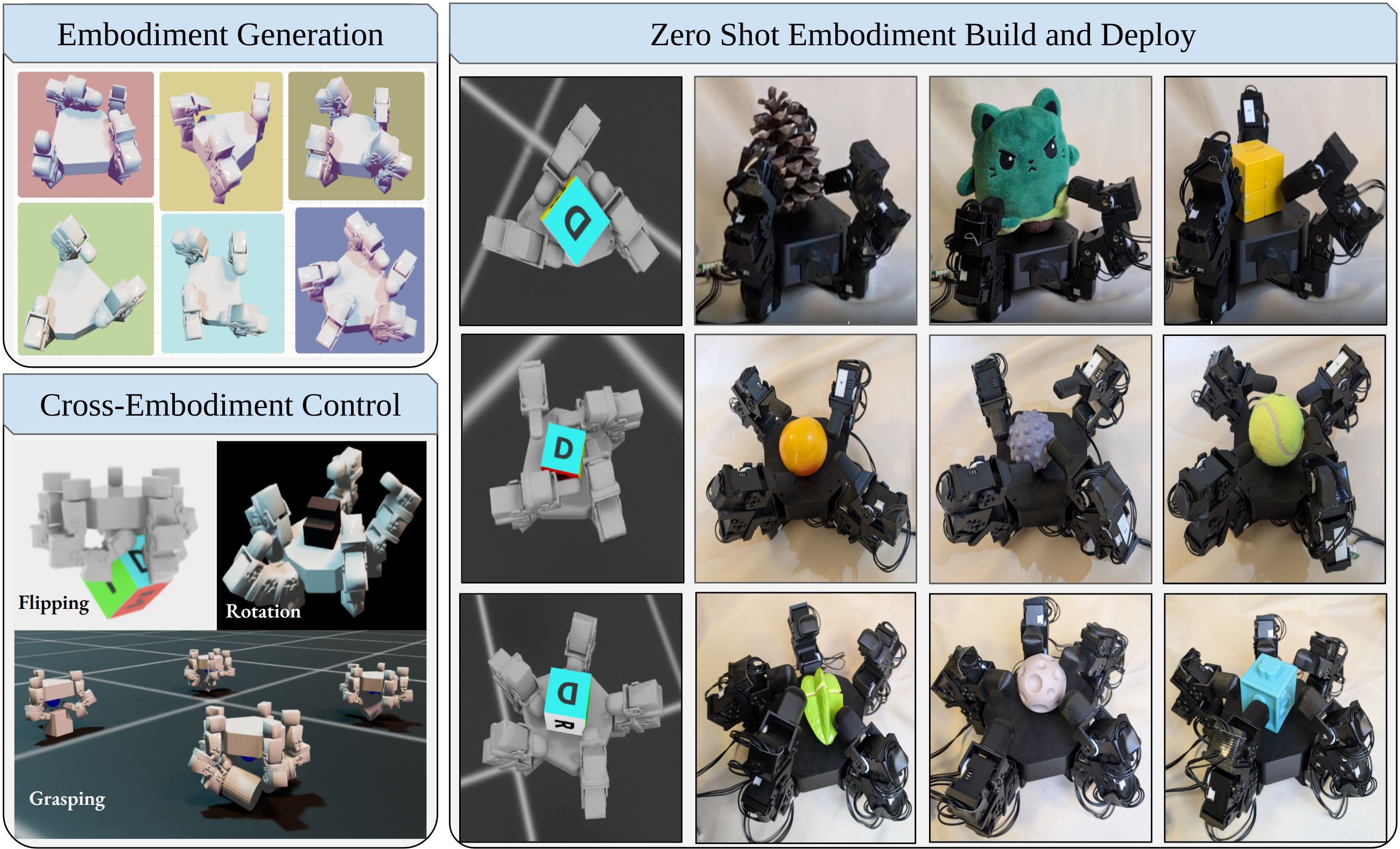
- 该框架支持快速设计、训练、制造和部署新的机器人手,并在手内旋转等任务上验证了其有效性。
📝 摘要(中文)
灵巧操作受到控制和设计的双重限制,目前对于何种机械手最适合执行灵巧任务尚未达成共识。这带来了一个根本性的挑战:我们应该如何设计和控制针对灵巧性优化的机器人机械手?本文提出了一种协同设计框架,该框架学习特定任务的手部形态和互补的灵巧控制策略。该框架支持1) 包含关节、手指和手掌生成的广泛形态搜索空间;2) 通过形态条件下的跨具身控制,在广泛的设计空间内进行可扩展的评估;3) 使用易于获得的组件进行真实世界的制造。我们在多个灵巧任务中评估了该方法,包括在模拟和真实部署中的手内旋转。我们的框架支持端到端的流程,可以在24小时内设计、训练、制造和部署新的机器人手。完整的框架将开源,并在我们的网站上提供。
🔬 方法详解
问题定义:现有灵巧手的设计和控制是分离的,缺乏针对特定任务的协同优化。这导致了两个主要问题:一是难以确定什么样的机械手形态最适合执行特定的灵巧操作任务;二是即使确定了合适的形态,也难以设计出能够充分利用该形态优势的控制策略。现有方法通常依赖于人工设计或启发式搜索,效率低下且难以泛化到新的任务和环境。
核心思路:本文的核心思路是将机械手的形态设计和控制策略学习结合起来,通过一个统一的框架进行协同优化。具体来说,该框架首先定义一个广泛的机械手形态搜索空间,然后利用强化学习等方法,针对不同的形态学习相应的控制策略。通过在模拟环境中对大量形态和控制策略组合进行评估,最终选择出能够最好地完成特定任务的机械手形态和控制策略。这种协同设计的方法能够充分考虑形态和控制之间的相互作用,从而获得更优的灵巧操作性能。
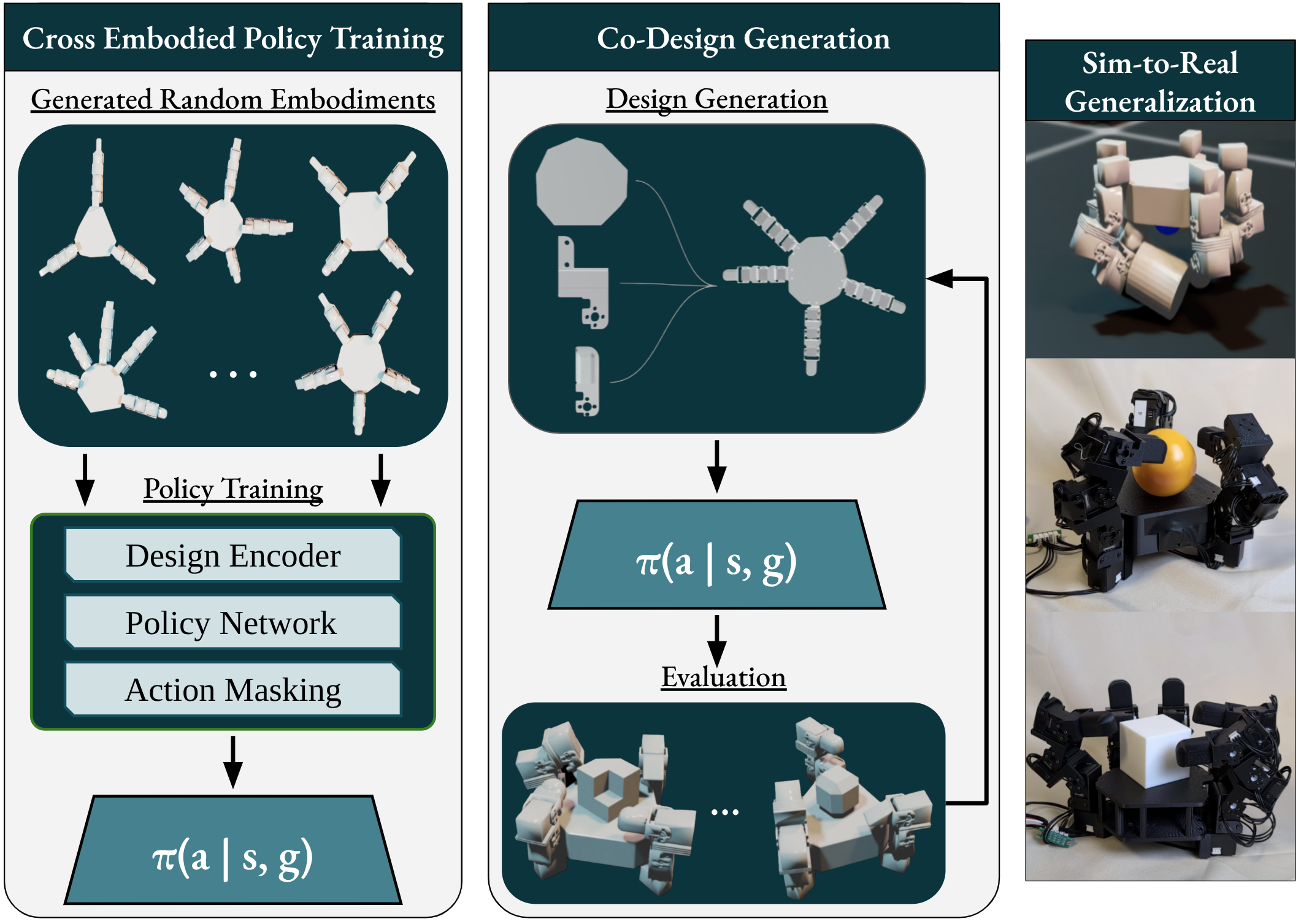
技术框架:该协同设计框架包含三个主要模块:1) 形态生成模块:该模块负责生成各种不同的机械手形态,包括关节数量、手指长度、手掌形状等参数。2) 控制策略学习模块:该模块利用强化学习等方法,针对每一种机械手形态学习相应的控制策略。该模块采用形态条件下的跨具身控制,使得学习到的控制策略可以泛化到不同的机械手形态上。3) 评估模块:该模块在模拟环境中对不同的机械手形态和控制策略组合进行评估,根据任务完成情况给出相应的奖励信号。整个框架采用迭代优化的方式,不断生成新的机械手形态,学习新的控制策略,并进行评估,最终选择出最优的机械手形态和控制策略。
关键创新:该论文最重要的技术创新点在于提出了一个协同设计框架,能够同时优化机械手的形态和控制策略。与现有方法相比,该框架能够充分考虑形态和控制之间的相互作用,从而获得更优的灵巧操作性能。此外,该框架还采用了形态条件下的跨具身控制,使得学习到的控制策略可以泛化到不同的机械手形态上,从而提高了学习效率。
关键设计:在形态生成模块中,论文定义了一个包含关节、手指和手掌生成的广泛形态搜索空间。在控制策略学习模块中,论文采用了强化学习算法,并设计了相应的奖励函数,以鼓励机械手完成特定的灵巧操作任务。在评估模块中,论文采用了模拟环境,并对不同的机械手形态和控制策略组合进行了大量的评估。此外,论文还考虑了真实世界的制造约束,使得设计出的机械手能够使用易于获得的组件进行制造。
🖼️ 关键图片

📊 实验亮点
该论文在手内旋转任务上进行了实验验证,结果表明,通过协同设计框架优化后的机械手在模拟和真实环境中均取得了显著的性能提升。该框架能够在24小时内完成机械手的快速设计、训练、制造和部署,展示了其高效性和实用性。实验结果表明,该方法能够有效地提高机器人的灵巧操作能力。
🎯 应用场景
该研究成果可广泛应用于机器人灵巧操作领域,例如工业自动化、医疗手术、家庭服务等。通过针对特定任务设计定制化的机械手,可以显著提高机器人的操作效率和精度。此外,该框架还可用于辅助人类专家进行机械手设计,缩短设计周期,降低设计成本。未来,该研究有望推动机器人灵巧操作技术的发展,使其能够更好地服务于人类社会。
📄 摘要(原文)
Dexterous manipulation is limited by both control and design, without consensus as to what makes manipulators best for performing dexterous tasks. This raises a fundamental challenge: how should we design and control robot manipulators that are optimized for dexterity? We present a co-design framework that learns task-specific hand morphology and complementary dexterous control policies. The framework supports 1) an expansive morphology search space including joint, finger, and palm generation, 2) scalable evaluation across the wide design space via morphology-conditioned cross-embodied control, and 3) real-world fabrication with accessible components. We evaluate the approach across multiple dexterous tasks, including in-hand rotation with simulation and real deployment. Our framework enables an end-to-end pipeline that can design, train, fabricate, and deploy a new robotic hand in under 24 hours. The full framework will be open-sourced and available on our website: https://an-axolotl.github.io/co-design-for-dexterity.github.io/