Multimodal Control of Manipulators: Coupling Kinematics and Vision for Self-Driving Laboratory Operations
作者: Shifa Sulaiman, Amarnath H, Simon Bogh, Naresh Marturi
分类: cs.RO
发布日期: 2025-12-03
💡 一句话要点
针对冗余机械臂,提出基于雅可比矩阵的多模态运动规划方案,用于自动化实验室操作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机械臂控制 运动规划 雅可比矩阵 逆运动学 螺旋理论
📋 核心要点
- 现有机械臂运动规划方法在处理冗余机械臂和复杂环境交互时存在局限性,难以保证轨迹的平滑性和运动的精确性。
- 提出一种基于雅可比矩阵的运动规划方案,结合RRT*算法进行轨迹规划,并使用螺旋理论进行运动学建模,从而实现对冗余机械臂的精确控制。
- 通过仿真实验,分析了三种不同的雅可比矩阵逆解方法(JT、PI、DLS)在不同任务下的性能表现,为实际应用选择合适的逆解方法提供依据。
📝 摘要(中文)
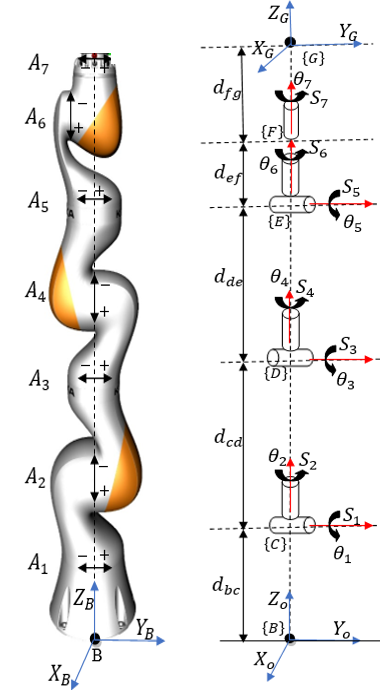
本文研究了基于雅可比矩阵的三种运动规划方案,用于控制带有耦合手指夹持器的冗余机械臂在给定轨迹上运动。方案采用RRT*算法进行轨迹规划,并基于螺旋理论的正运动学方程求解机械臂和夹持器的关节解。逆解分别使用雅可比转置(JT)、伪逆(PI)和阻尼最小二乘(DLS)三种基于雅可比矩阵的方法计算。利用螺旋理论公式获得了机械臂和夹持器的空间雅可比矩阵和可操作性度量。通过分析生成轨迹的平滑性和均方根误差,以及关节运动的速度连续性、加速度曲线、加加速度和急动度值,确定了适用于给定任务的有效运动规划方法。通过仿真研究分析了上述运动规划方案的优缺点,以确定适合任务的逆解技术。
🔬 方法详解
问题定义:论文旨在解决冗余机械臂在自动化实验室操作中的运动规划问题。现有方法在处理冗余自由度时,容易出现关节抖动、奇异点问题,导致轨迹不平滑,影响操作精度和效率。此外,现有方法对机械臂和末端执行器的运动学建模不够精确,难以实现复杂操作。
核心思路:论文的核心思路是将轨迹规划和逆运动学解算相结合,利用RRT*算法生成全局最优轨迹,并采用基于雅可比矩阵的逆解方法求解关节空间轨迹。通过分析不同逆解方法的优缺点,选择适合特定任务的逆解方法,从而提高运动规划的效率和精度。同时,利用螺旋理论对机械臂和末端执行器进行精确建模,提高运动控制的准确性。
技术框架:整体框架包括以下几个主要模块:1) 轨迹规划模块:使用RRT*算法生成机械臂末端执行器的目标轨迹。2) 运动学建模模块:使用螺旋理论建立机械臂和末端执行器的运动学模型。3) 逆运动学解算模块:分别使用雅可比转置(JT)、伪逆(PI)和阻尼最小二乘(DLS)三种方法求解关节空间轨迹。4) 性能评估模块:分析生成轨迹的平滑性、均方根误差,以及关节运动的速度连续性、加速度曲线、加加速度和急动度值。
关键创新:论文的关键创新在于:1) 综合比较了三种基于雅可比矩阵的逆解方法在冗余机械臂运动规划中的性能,为实际应用选择合适的逆解方法提供了指导。2) 将螺旋理论应用于机械臂和末端执行器的运动学建模,提高了运动控制的精度。3) 结合RRT*算法和雅可比矩阵逆解方法,实现了一种高效的运动规划方案。
关键设计:论文的关键设计包括:1) RRT*算法的参数设置,如步长、采样策略等,影响轨迹规划的效率和质量。2) 雅可比矩阵逆解方法的阻尼系数设置,影响解的稳定性和精度。3) 性能评估指标的选择,如轨迹平滑性、均方根误差、关节运动的速度连续性等,用于评估不同运动规划方案的性能。
🖼️ 关键图片


📊 实验亮点
论文通过仿真实验,对比了雅可比转置(JT)、伪逆(PI)和阻尼最小二乘(DLS)三种逆解方法在不同任务下的性能表现。实验结果表明,DLS方法在处理奇异点问题时具有更好的鲁棒性,能够生成更平滑的轨迹。此外,论文还分析了不同逆解方法对关节运动速度、加速度、加加速度和急动度的影响,为实际应用选择合适的逆解方法提供了依据。
🎯 应用场景
该研究成果可应用于自动化实验室、智能制造、医疗机器人等领域。在自动化实验室中,可以实现机械臂对实验设备的精确操作,提高实验效率和可重复性。在智能制造中,可以实现机械臂对复杂工件的装配和加工,提高生产效率和产品质量。在医疗机器人中,可以实现机械臂辅助医生进行手术,提高手术精度和安全性。
📄 摘要(原文)
Motion planning schemes are used for planning motions of a manipulator from an initial pose to a final pose during a task execution. A motion planning scheme generally comprises of a trajectory planning method and an inverse kinematic solver to determine trajectories and joints solutions respectively. In this paper, 3 motion planning schemes developed based on Jacobian methods are implemented to traverse a redundant manipulator with a coupled finger gripper through given trajectories. RRT* algorithm is used for planning trajectories and screw theory based forward kinematic equations are solved for determining joint solutions of the manipulator and gripper. Inverse solutions are computed separately using 3 Jacobian based methods such as Jacobian Transpose (JT), Pseudo Inverse (PI), and Damped Least Square (DLS) methods. Space Jacobian and manipulability measurements of the manipulator and gripper are obtained using screw theory formulations. Smoothness and RMSE error of generated trajectories and velocity continuity, acceleration profile, jerk, and snap values of joint motions are analysed for determining an efficient motion planning method for a given task. Advantages and disadvantages of the proposed motion planning schemes mentioned above are analysed using simulation studies to determine a suitable inverse solution technique for the tasks.