AdaPower: Specializing World Foundation Models for Predictive Manipulation
作者: Yuhang Huang, Shilong Zou, Jiazhao Zhang, Xinwang Liu, Ruizhen Hu, Kai Xu
分类: cs.RO
发布日期: 2025-12-03
💡 一句话要点
AdaPower:通过自适应世界模型提升预测性操作的性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 世界模型 自适应学习 机器人控制 模型预测控制 视觉语言动作 时空一致性 记忆持久化
📋 核心要点
- 世界基础模型在机器人控制中面临精度挑战,现有方法计算成本高且未能充分利用预训练策略。
- AdaPower通过时空测试时训练和记忆持久化,轻量级地将通用世界模型适配为专业模型。
- 实验表明,AdaPower在LIBERO基准测试中显著提升了任务成功率,且无需策略再训练。
📝 摘要(中文)
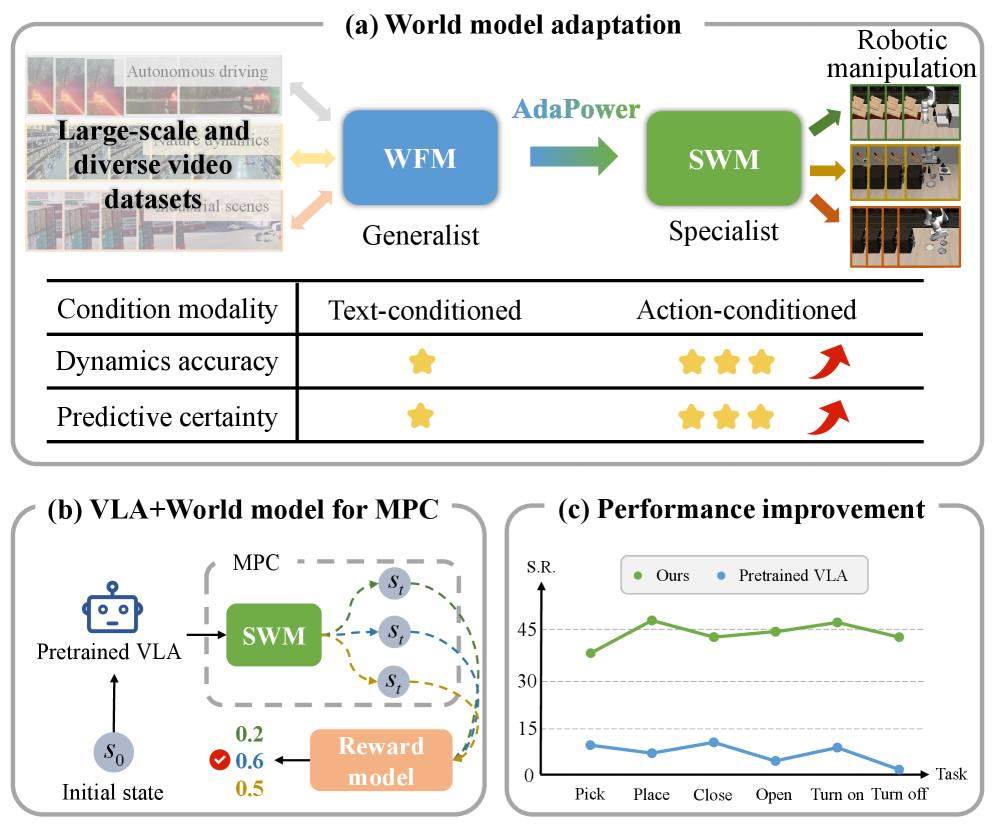
世界基础模型(WFMs)展现了卓越的视觉动态模拟能力,但由于生成真实感与面向控制的精度之间存在差距,其在精确机器人控制中的应用仍然受限。现有方法通常将WFMs用作合成数据生成器,但计算成本高昂,且未能充分利用预训练的VLA策略。我们提出了AdaPower(Adapt and Empower),一个轻量级的自适应框架,通过两个新颖的组件将通用WFMs转换为专业的世界模型:用于推理时自适应的时空测试时训练(TS-TTT)和用于长时程一致性的记忆持久化(MP)。集成到模型预测控制框架中,我们自适应的世界模型增强了预训练的VLA,在LIBERO基准测试中实现了超过41%的任务成功率提升,且无需策略再训练,同时保持了计算效率和通用能力。
🔬 方法详解
问题定义:论文旨在解决世界基础模型(WFMs)在预测性操作任务中精度不足的问题。现有方法主要将WFMs作为合成数据生成器,存在计算成本高昂,以及未能充分利用预训练的视觉语言动作(VLA)策略的痛点。这限制了WFMs在实际机器人控制中的应用。
核心思路:论文的核心思路是通过轻量级的自适应框架AdaPower,将通用的WFMs转化为特定任务的专业世界模型。AdaPower通过在推理时进行自适应训练,并引入记忆机制来保持长时程的一致性,从而提高预测精度,并赋能预训练的VLA策略。
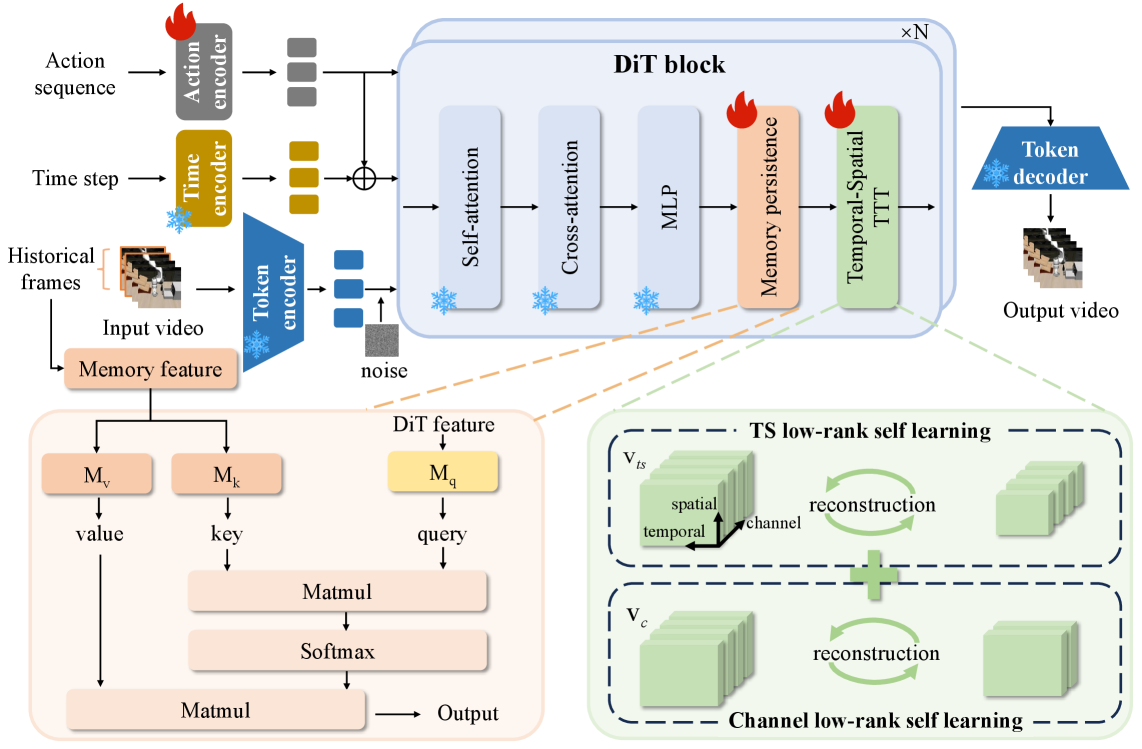
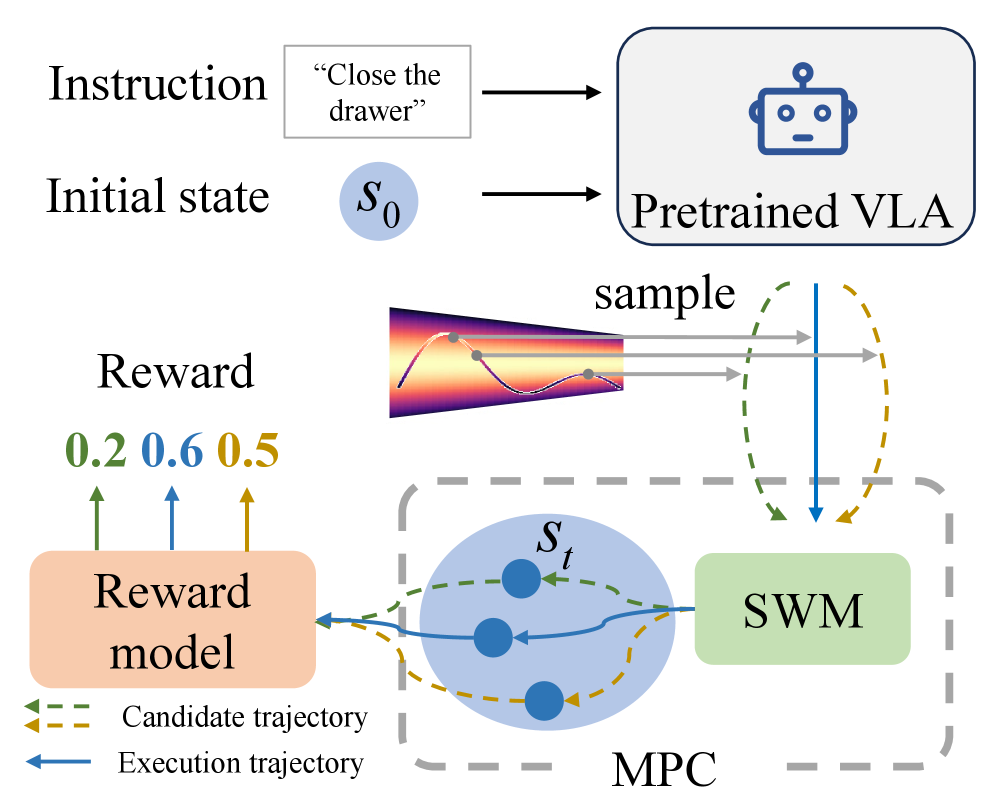
技术框架:AdaPower框架主要包含两个核心组件:时空测试时训练(TS-TTT)和记忆持久化(MP)。TS-TTT在推理阶段利用少量真实数据对世界模型进行微调,使其适应特定任务的环境和动态特性。MP则通过维护一个记忆库,存储历史状态和预测信息,从而增强模型对长时程依赖关系的建模能力。AdaPower被集成到模型预测控制(MPC)框架中,利用自适应的世界模型来预测未来状态,并优化控制策略。
关键创新:AdaPower的关键创新在于其轻量级的自适应方法,能够在推理时快速调整世界模型,使其适应特定任务。与传统的离线训练方法相比,AdaPower无需大量的训练数据和计算资源。此外,MP模块通过引入记忆机制,有效解决了世界模型在长时程预测中容易出现的不一致性问题。AdaPower通过自适应世界模型赋能预训练的VLA策略,避免了从头开始训练策略的昂贵代价。
关键设计:TS-TTT模块采用了一种时空一致性的损失函数,鼓励模型在时间和空间上产生一致的预测。MP模块使用一个循环缓冲区来存储历史状态和预测信息,并采用注意力机制来选择相关的记忆片段。在MPC框架中,AdaPower使用自适应的世界模型来预测未来状态,并使用交叉熵方法来优化控制策略。具体的参数设置(如学习率、记忆库大小等)需要根据具体任务进行调整。
🖼️ 关键图片
📊 实验亮点
实验结果表明,AdaPower在LIBERO基准测试中,无需策略再训练的情况下,任务成功率提升超过41%。与现有方法相比,AdaPower在保持计算效率的同时,显著提高了预测精度和控制性能。这验证了AdaPower在提升世界模型在预测性操作任务中性能的有效性。
🎯 应用场景
AdaPower具有广泛的应用前景,可用于各种机器人操作任务,例如物体抓取、装配和导航。该方法能够提高机器人在复杂环境中的适应性和鲁棒性,降低对大量训练数据的依赖,并加速机器人技能的学习和部署。此外,AdaPower还可以应用于虚拟现实、游戏等领域,提升虚拟环境的真实感和交互性。
📄 摘要(原文)
World Foundation Models (WFMs) offer remarkable visual dynamics simulation capabilities, yet their application to precise robotic control remains limited by the gap between generative realism and control-oriented precision. While existing approaches use WFMs as synthetic data generators, they suffer from high computational costs and underutilization of pre-trained VLA policies. We introduce \textbf{AdaPower} (\textbf{Ada}pt and Em\textbf{power}), a lightweight adaptation framework that transforms general-purpose WFMs into specialist world models through two novel components: Temporal-Spatial Test-Time Training (TS-TTT) for inference-time adaptation and Memory Persistence (MP) for long-horizon consistency. Integrated within a Model Predictive Control framework, our adapted world model empowers pre-trained VLAs, achieving over 41\% improvement in task success rates on LIBERO benchmarks without policy retraining, while preserving computational efficiency and generalist capabilities.