A Cross-Embodiment Gripper Benchmark for Rigid-Object Manipulation in Aerial and Industrial Robotics
作者: Marek Vagas, Martin Varga, Jaroslav Romancik, Ondrej Majercak, Alejandro Suarez, Anibal Ollero, Bram Vanderborght, Ivan Virgala
分类: cs.RO
发布日期: 2025-12-01
💡 一句话要点
提出跨平台机械爪基准测试CEGB,用于评估空中和工业机器人刚性物体操作的性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting)
关键词: 机械爪 基准测试 机器人 空中机器人 工业机器人 能量效率 跨平台 刚性物体操作
📋 核心要点
- 现有机械爪基准测试缺乏对跨平台迁移能力和能量效率的评估,限制了其在现代移动和空中操作中的应用。
- CEGB通过引入迁移时间、能耗和特定意图的理想负载评估,扩展了现有基准测试,实现了跨平台、能量感知的评估。
- 实验结果表明,所提出的CEGB能够有效评估机械爪的跨平台性能和能量效率,并提供了一个可复现的评估基础。
📝 摘要(中文)
本文提出了一种跨平台机械爪基准测试(CEGB),旨在解决工业、协作和空中机器人平台上机械爪的评估问题。现有基准测试如YCB和NIST虽然能评估单个平台上的抓取成功率、力和时间,但缺乏对跨平台迁移能力和能量效率的评估,这对于现代移动和空中操作至关重要。CEGB扩展了YCB和NIST指标,增加了三个关键组件:迁移时间基准,评估平台间切换的实际工作量;能耗基准,评估抓取和保持的效率;以及特定意图的理想负载评估,反映了设计相关的操作能力。这些指标共同表征了抓取性能以及单个机械爪在异构机器人系统中的适用性。论文实现了一个轻量级自锁机械爪原型作为参考案例,实验表明其具有快速的平台迁移速度(中位数约为17.6秒),较低的保持能量消耗(约为每10秒1.5焦耳),以及一致的抓取性能(周期时间为3.2-3.9秒,成功率超过90%)。CEGB为空中和操作机器人领域中机械爪的跨平台、能量感知评估提供了一个可复现的基础。
🔬 方法详解
问题定义:现有机械爪基准测试,如YCB和NIST,主要关注单个机器人平台上的抓取性能,例如抓取成功率、作用力或时间。然而,在工业、协作和空中机器人等异构平台上,机械爪的跨平台迁移能力和能量效率至关重要,而现有基准测试缺乏对这些方面的评估。因此,需要一种新的基准测试来评估机械爪在不同机器人平台上的适用性和性能。
核心思路:CEGB的核心思路是通过扩展现有的YCB和NIST基准测试,增加三个关键组件:迁移时间基准、能耗基准和特定意图的理想负载评估。这些组件分别评估了机械爪在不同平台间切换的难易程度、抓取和保持过程中的能量消耗以及设计相关的操作能力。通过综合评估这些指标,可以全面地了解机械爪的跨平台性能和能量效率。
技术框架:CEGB的整体框架包括以下几个主要模块:1) YCB和NIST指标:用于评估基本的抓取性能,如抓取成功率和时间。2) 迁移时间基准:测量将机械爪从一个机器人平台转移到另一个平台所需的时间。3) 能耗基准:评估机械爪在抓取和保持物体时的能量消耗。4) 特定意图的理想负载评估:根据机械爪的设计,评估其在特定任务中的最大负载能力。这些模块共同构成了一个完整的评估体系,可以全面地评估机械爪的性能。
关键创新:CEGB的最重要的技术创新点在于其跨平台性和能量感知能力。与现有的基准测试相比,CEGB不仅关注单个平台上的抓取性能,还考虑了机械爪在不同平台间的迁移难易程度和能量消耗。这使得CEGB能够更全面地评估机械爪在实际应用中的性能,并为机械爪的设计和选择提供更有效的指导。
关键设计:CEGB的关键设计包括:1) 迁移时间基准:采用标准化的流程来评估平台间切换所需的时间,包括拆卸、安装和校准等步骤。2) 能耗基准:使用高精度能量测量设备来评估机械爪在抓取和保持物体时的能量消耗,并考虑不同负载和抓取姿势的影响。3) 特定意图的理想负载评估:根据机械爪的设计参数,如电机扭矩和结构强度,计算其在特定任务中的最大负载能力。
🖼️ 关键图片
📊 实验亮点
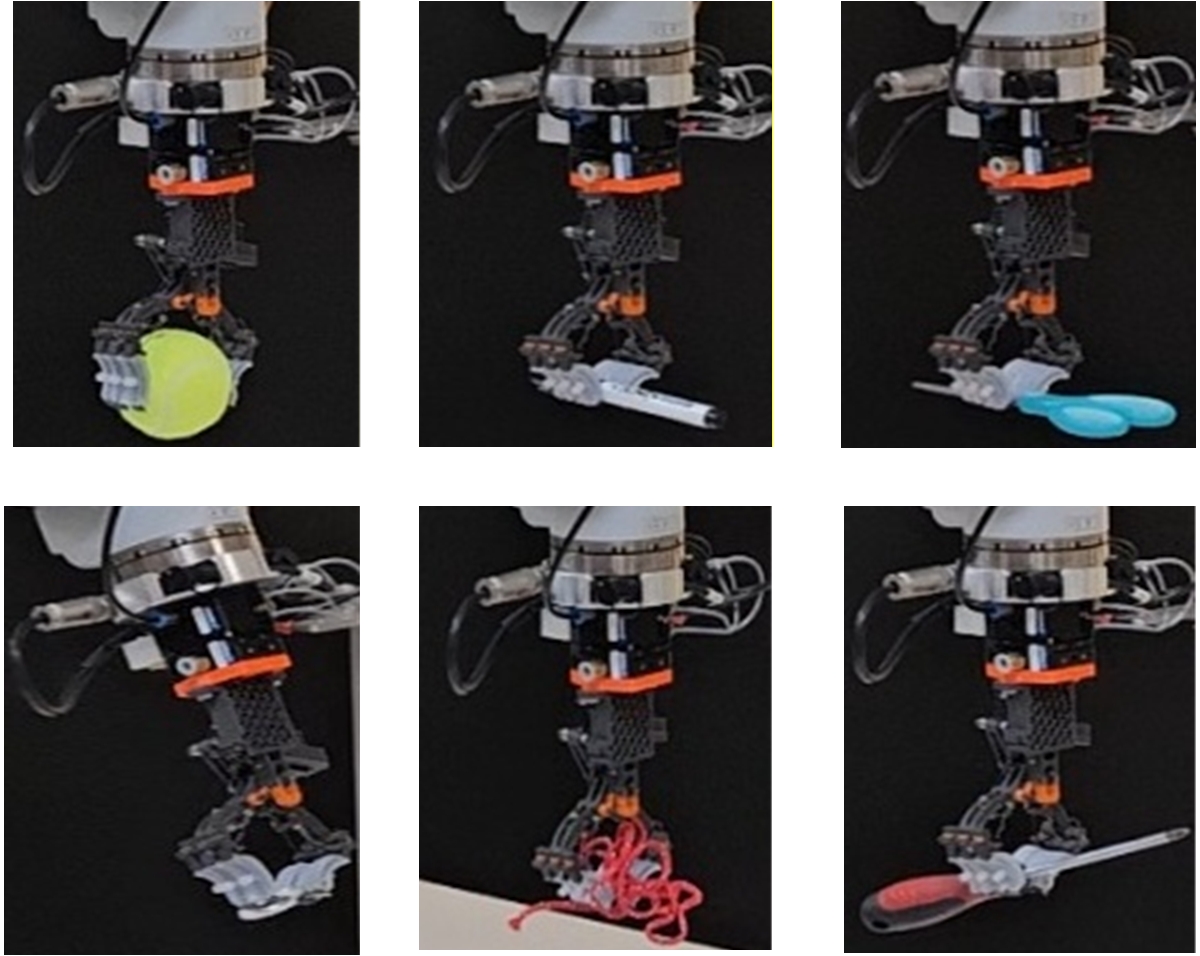
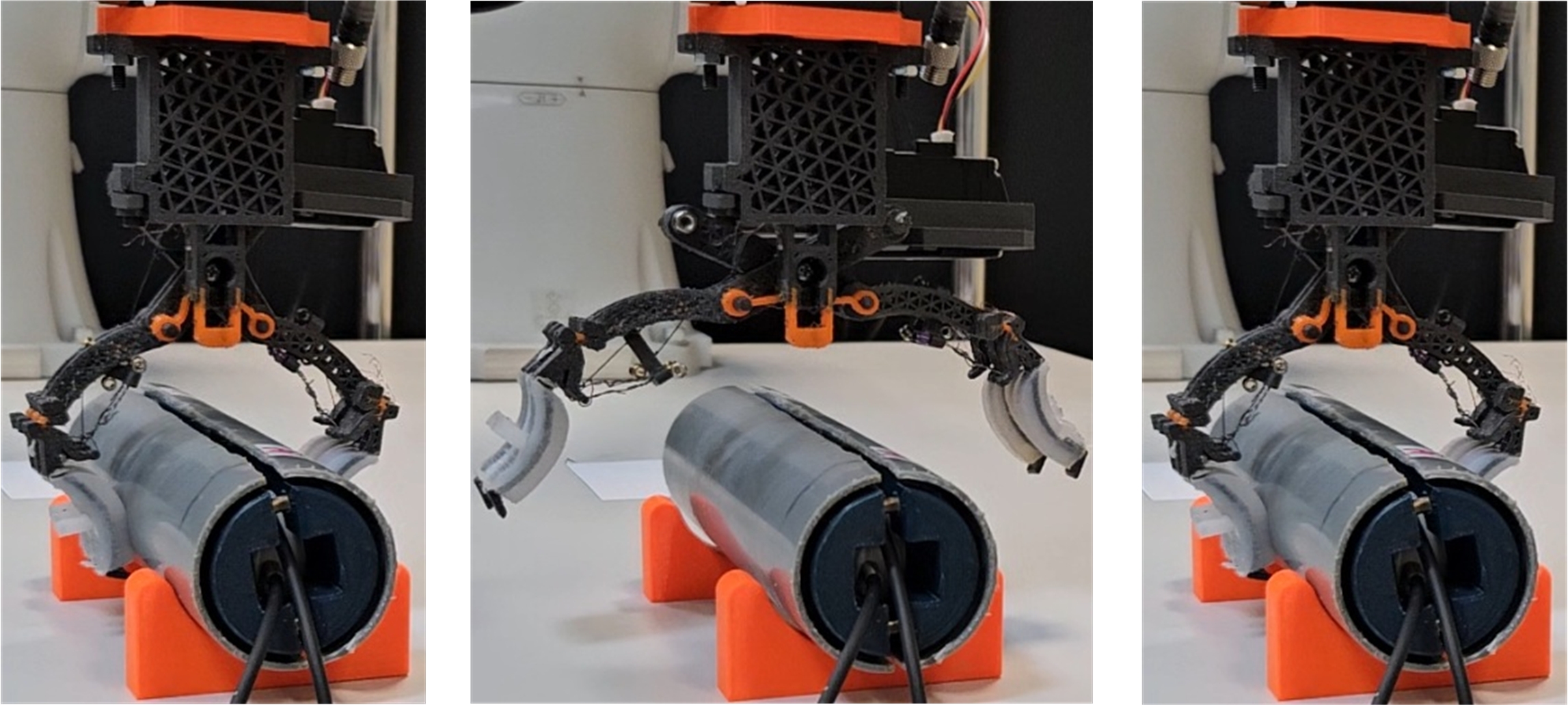
实验结果表明,所提出的轻量级自锁机械爪原型具有快速的平台迁移速度(中位数约为17.6秒),较低的保持能量消耗(约为每10秒1.5焦耳),以及一致的抓取性能(周期时间为3.2-3.9秒,成功率超过90%)。这些结果验证了CEGB的有效性,并表明该机械爪原型具有良好的跨平台性能和能量效率。
🎯 应用场景
CEGB可广泛应用于工业自动化、协作机器人和空中机器人等领域。它可以帮助工程师选择合适的机械爪,优化机械爪的设计,并评估机械爪在不同平台上的性能。此外,CEGB还可以促进机械爪技术的标准化和发展,提高机器人系统的效率和可靠性。
📄 摘要(原文)
Robotic grippers are increasingly deployed across industrial, collaborative, and aerial platforms, where each embodiment imposes distinct mechanical, energetic, and operational constraints. Established YCB and NIST benchmarks quantify grasp success, force, or timing on a single platform, but do not evaluate cross-embodiment transferability or energy-aware performance, capabilities essential for modern mobile and aerial manipulation. This letter introduces the Cross-Embodiment Gripper Benchmark (CEGB), a compact and reproducible benchmarking suite extending YCB and selected NIST metrics with three additional components: a transfer-time benchmark measuring the practical effort required to exchange embodiments, an energy-consumption benchmark evaluating grasping and holding efficiency, and an intent-specific ideal payload assessment reflecting design-dependent operational capability. Together, these metrics characterize both grasp performance and the suitability of reusing a single gripper across heterogeneous robotic systems. A lightweight self-locking gripper prototype is implemented as a reference case. Experiments demonstrate rapid embodiment transfer (median ~= 17.6 s across user groups), low holding energy for gripper prototype (~= 1.5 J per 10 s), and consistent grasp performance with cycle times of 3.2 - 3.9 s and success rates exceeding 90%. CEGB thus provides a reproducible foundation for cross-platform, energy-aware evaluation of grippers in aerial and manipulators domains.