L2M-Calib: One-key Calibration Method for LiDAR and Multiple Magnetic Sensors
作者: Qiyang Lyu, Wei Wang, Zhenyu Wu, Hongming Shen, Huiqin Zhou, Danwei Wang
分类: cs.RO
发布日期: 2025-12-01
💡 一句话要点
提出L2M-Calib,用于激光雷达与多磁传感器的一键式标定
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 激光雷达 磁传感器 多传感器融合 外参标定 内参校正
📋 核心要点
- 多模态传感器融合依赖精确标定,但磁传感器与激光雷达的融合标定缺乏有效方法。
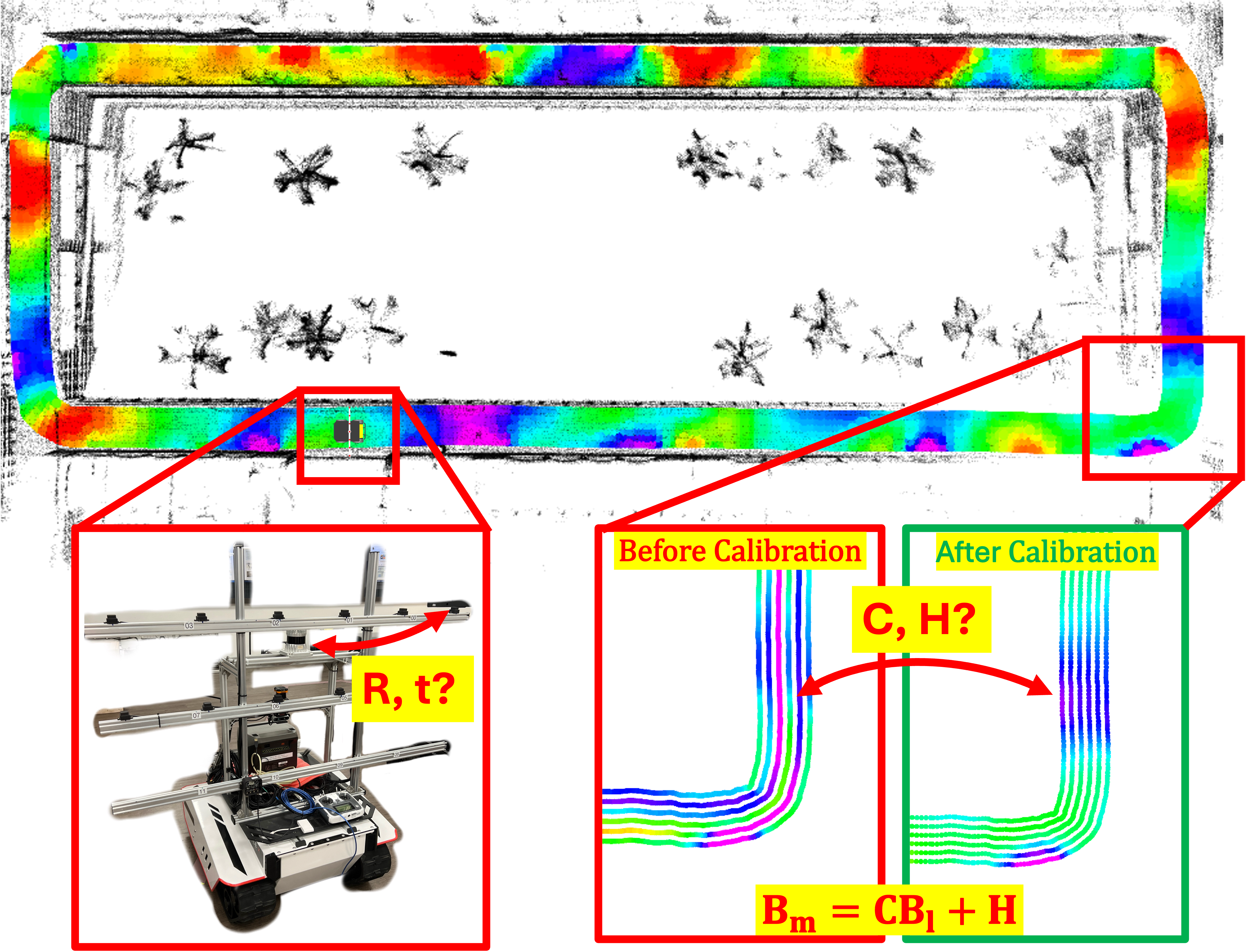
- L2M-Calib框架通过联合优化外参和磁传感器内参,实现一键式标定。
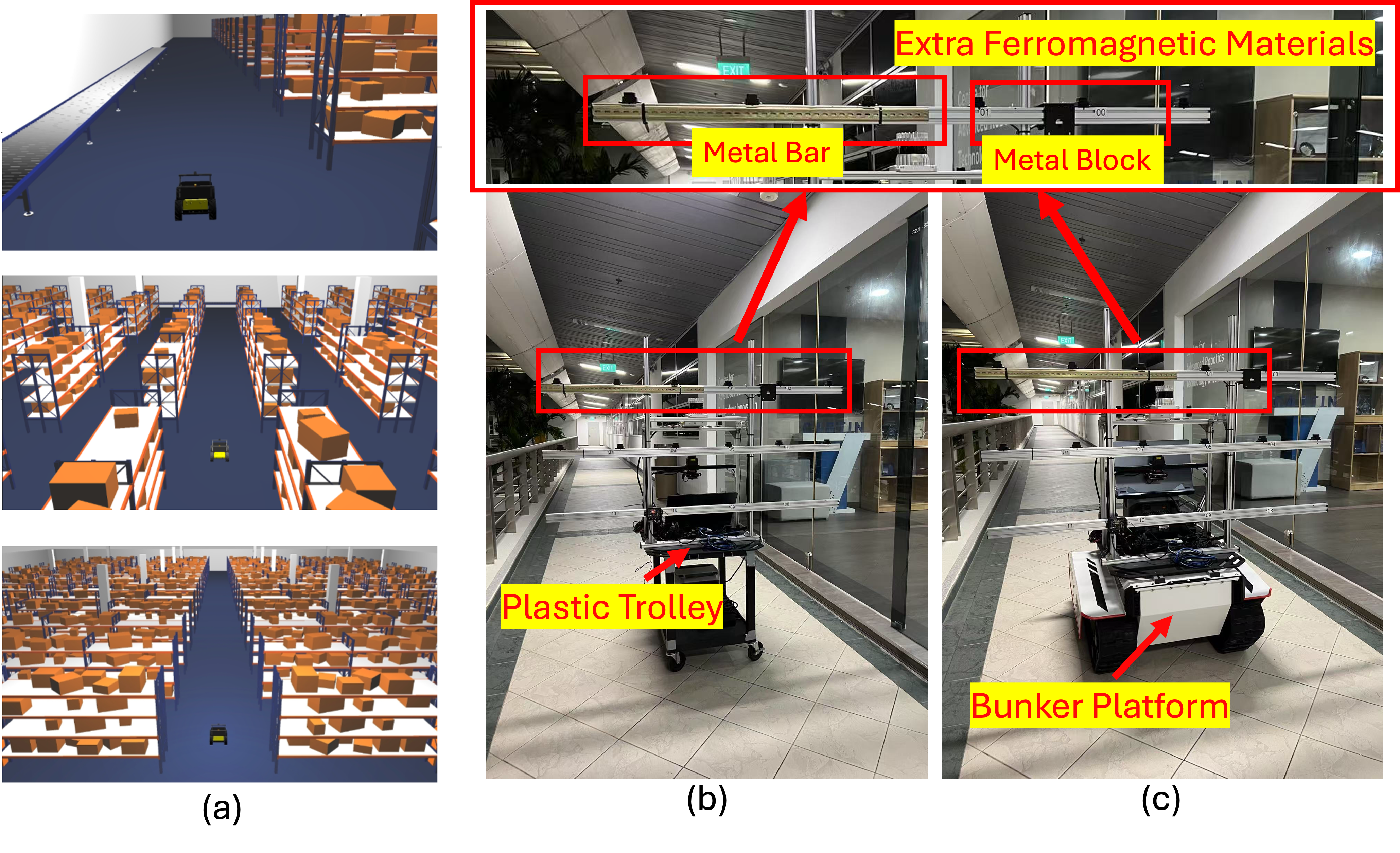
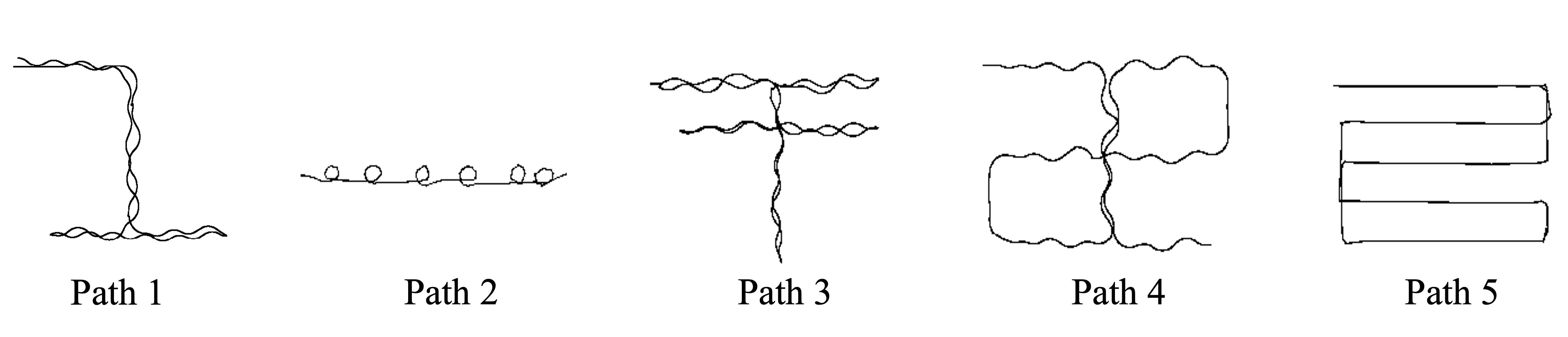
- 实验证明,该方法在模拟和真实环境中均表现出高精度和鲁棒性,适用于AGV等场景。
📝 摘要(中文)
本文提出了一种名为L2M-Calib的新型一键式标定框架,用于融合磁传感器和激光雷达的系统。该框架联合估计两种传感器之间的外部变换以及磁传感器的内部畸变参数。磁传感器捕获的环境磁场(AMF)模式对几何形状、纹理、光照和天气具有不变性,使其适用于具有挑战性的环境。然而,由于缺乏有效的标定技术,磁传感在多模态系统中的集成仍未得到充分探索。为了解决这个问题,我们使用迭代高斯-牛顿方案优化外部参数,并结合内部标定作为一个加权岭正则化总体最小二乘(w-RRTLS)问题,确保对测量噪声和病态数据的鲁棒性。在模拟数据集和真实世界实验(包括AGV安装的传感器配置)上的大量评估表明,我们的方法在各种环境和操作条件下实现了高标定精度和鲁棒性。
🔬 方法详解
问题定义:论文旨在解决激光雷达与多个磁传感器融合系统中的外参标定问题,以及磁传感器自身的内部畸变校正问题。现有方法缺乏针对磁传感器的有效标定技术,导致磁传感器在多模态融合中的应用受限。此外,噪声和病态数据会影响标定精度。
核心思路:论文的核心思路是联合优化激光雷达与磁传感器的外参和磁传感器的内参。利用环境磁场对几何、纹理、光照和天气的不变性,设计鲁棒的优化算法。通过迭代优化外参,并使用加权岭正则化总体最小二乘法(w-RRTLS)进行内参校正,提高对噪声和病态数据的抵抗能力。
技术框架:L2M-Calib框架主要包含两个阶段:外参标定和内参校正。首先,利用迭代高斯-牛顿法优化激光雷达与磁传感器之间的外部变换矩阵。然后,将内参校正问题转化为一个加权岭正则化总体最小二乘问题(w-RRTLS),用于估计磁传感器的内部畸变参数。这两个阶段相互配合,实现联合标定。
关键创新:该方法最重要的创新点在于提出了一种针对激光雷达和多磁传感器融合系统的联合标定框架,同时考虑了外参标定和磁传感器内参校正。与传统方法相比,L2M-Calib能够更准确地估计传感器之间的相对位姿,并校正磁传感器的内部畸变,从而提高融合系统的整体性能。此外,w-RRTLS的使用增强了对噪声和病态数据的鲁棒性。
关键设计:外参优化采用迭代高斯-牛顿法,损失函数基于激光雷达点云和磁场数据的对应关系构建。内参校正的w-RRTLS问题中,权重根据磁场数据的质量进行设置,岭正则化参数用于控制解的稳定性。具体参数设置需要根据实际应用场景进行调整。
🖼️ 关键图片
📊 实验亮点
在模拟和真实数据集上的实验结果表明,L2M-Calib能够实现高精度的标定。在AGV平台上进行的实验验证了该方法在实际应用中的有效性。具体性能数据(例如标定误差)在论文中进行了详细展示,证明了该方法优于现有的标定技术。
🎯 应用场景
该研究成果可广泛应用于自动驾驶、机器人导航、AGV等领域。通过精确标定激光雷达和磁传感器,可以提高环境感知系统的鲁棒性和准确性,尤其是在光照不足、纹理缺失等挑战性环境中。未来,该方法有望促进磁传感器在多模态融合感知系统中的更广泛应用,提升系统的环境适应能力。
📄 摘要(原文)
Multimodal sensor fusion enables robust environmental perception by leveraging complementary information from heterogeneous sensing modalities. However, accurate calibration is a critical prerequisite for effective fusion. This paper proposes a novel one-key calibration framework named L2M-Calib for a fused magnetic-LiDAR system, jointly estimating the extrinsic transformation between the two kinds of sensors and the intrinsic distortion parameters of the magnetic sensors. Magnetic sensors capture ambient magnetic field (AMF) patterns, which are invariant to geometry, texture, illumination, and weather, making them suitable for challenging environments. Nonetheless, the integration of magnetic sensing into multimodal systems remains underexplored due to the absence of effective calibration techniques. To address this, we optimize extrinsic parameters using an iterative Gauss-Newton scheme, coupled with the intrinsic calibration as a weighted ridge-regularized total least squares (w-RRTLS) problem, ensuring robustness against measurement noise and ill-conditioned data. Extensive evaluations on both simulated datasets and real-world experiments, including AGV-mounted sensor configurations, demonstrate that our method achieves high calibration accuracy and robustness under various environmental and operational conditions.