Safe Autonomous Lane Changing: Planning with Dynamic Risk Fields and Time-Varying Convex Space Generation
作者: Zhen Tian, Zhihao Lin
分类: cs.RO, cs.HC
发布日期: 2025-11-28
💡 一句话要点
提出基于动态风险场和时变凸空间生成的安全自主变道规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主变道 轨迹规划 动态风险场 凸优化 最优控制 iLQR 自动驾驶
📋 核心要点
- 现有自主变道方法难以在保证安全性的同时兼顾效率和舒适性,尤其是在复杂动态交通环境中。
- 该论文提出了一种基于动态风险场(DRF)和时变凸可行空间(TVCFS)的轨迹规划方法,并使用约束iLQR进行优化。
- 实验表明,该方法在变道距离、变道时间、安全性、平滑性和舒适性方面均优于传统方法,尤其在环岛环境中表现出色。
📝 摘要(中文)
本文提出了一种用于复杂驾驶场景(如自主变道)的新型轨迹规划流程,该流程将风险感知规划与有保证的避撞集成到一个统一的优化框架中。首先,构建一个动态风险场(DRF),以捕获来自周围车辆的静态和动态碰撞风险。然后,开发一种严格的策略,用于生成时变凸可行空间,以确保运动学可行性和安全要求。轨迹规划问题被表述为一个有限范围最优控制问题,并使用约束迭代线性二次调节器(iLQR)算法求解,该算法在保持严格可行性的同时,联合优化轨迹平滑度、控制力度和风险暴露。大量仿真表明,该方法在安全性和效率方面优于传统方法,实现了无碰撞轨迹,同时具有更短的变道距离(28.59米)和时间(2.84秒),并保持平稳舒适的加速度模式。在密集的环岛环境中,该规划器进一步展示了强大的适应性,与基于APF、MPC和RRT的基线相比,产生了更大的安全裕度、更低的加加速度和卓越的曲率平滑度。这些结果证实,集成的DRF与凸可行空间和约束iLQR求解器为动态和交互式交通场景中安全、高效和舒适的轨迹生成提供了一个平衡的解决方案。
🔬 方法详解
问题定义:自主变道需要在复杂的动态交通环境中,安全、高效、舒适地完成车辆的横向移动。现有方法通常难以在安全性(避免碰撞)、效率(快速完成变道)和舒适性(平滑的加速度变化)之间取得平衡,尤其是在车辆密度高、交互性强的场景下,避撞规划的难度显著增加。
核心思路:该论文的核心思路是将风险感知规划与有保证的避撞集成到一个统一的优化框架中。通过动态风险场(DRF)量化周围车辆带来的碰撞风险,并利用时变凸可行空间(TVCFS)确保规划的轨迹满足运动学约束和安全要求。最终,使用约束迭代线性二次调节器(iLQR)算法在可行空间内优化轨迹,从而在安全性、效率和舒适性之间取得平衡。
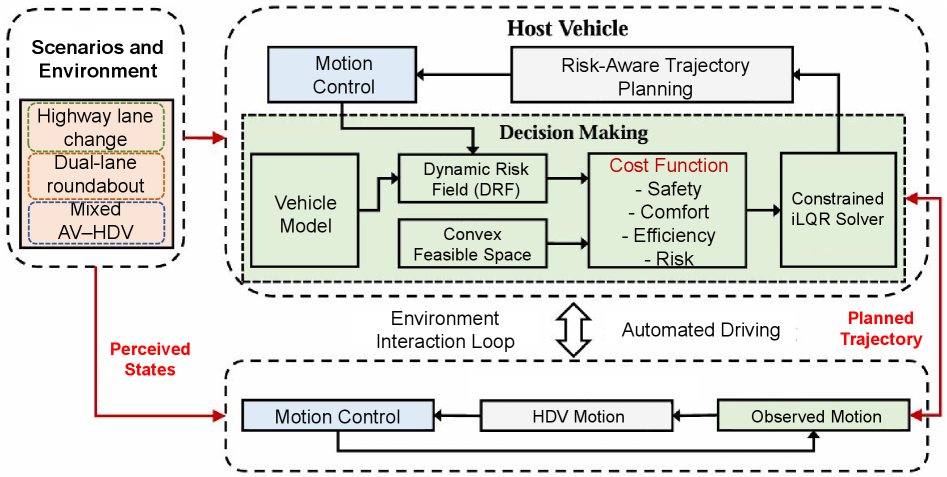
技术框架:该方法包含以下主要模块:1) 动态风险场(DRF)构建:根据周围车辆的位置、速度等信息,构建一个动态变化的风险场,用于评估潜在的碰撞风险。2) 时变凸可行空间(TVCFS)生成:基于车辆的运动学约束和安全距离要求,生成一系列随时间变化的凸可行空间,确保规划的轨迹始终保持在安全区域内。3) 轨迹优化:将轨迹规划问题表述为一个有限范围最优控制问题,并使用约束iLQR算法求解,该算法在可行空间内优化轨迹的平滑度、控制力度和风险暴露。
关键创新:该方法最重要的技术创新点在于将动态风险场(DRF)和时变凸可行空间(TVCFS)集成到一个统一的优化框架中。DRF能够有效地量化动态环境中的碰撞风险,TVCFS能够保证规划轨迹的安全性,而约束iLQR算法能够在可行空间内高效地优化轨迹。与传统的基于采样或势场的方法相比,该方法能够更好地处理复杂的动态交通场景,并在安全性、效率和舒适性方面取得更好的性能。
关键设计:DRF的设计考虑了车辆的速度、加速度等因素,并使用高斯函数对风险进行建模。TVCFS的生成基于车辆的运动学约束和安全距离要求,并使用凸优化方法生成凸可行空间。约束iLQR算法使用二次代价函数来优化轨迹的平滑度、控制力度和风险暴露,并使用约束条件来保证轨迹的可行性。
🖼️ 关键图片

📊 实验亮点
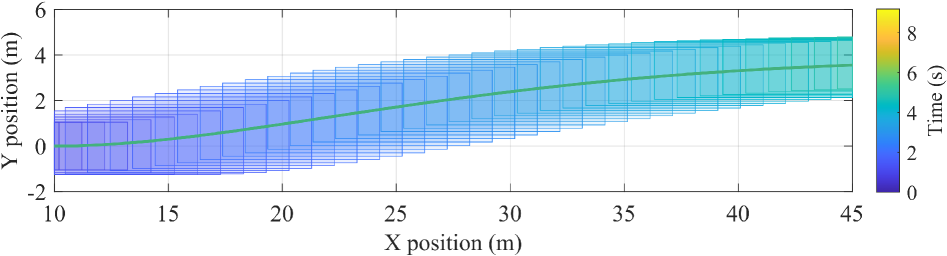
仿真结果表明,该方法在自主变道任务中取得了显著的性能提升。与传统方法相比,该方法能够以更短的变道距离(28.59米)和时间(2.84秒)完成变道,同时保持平稳舒适的加速度模式。在密集的环岛环境中,该方法能够产生更大的安全裕度、更低的加加速度和卓越的曲率平滑度,优于APF、MPC和RRT等基线方法。
🎯 应用场景
该研究成果可应用于各种自动驾驶场景,尤其是在城市道路、高速公路和环岛等复杂交通环境中。通过提高自主变道的安全性、效率和舒适性,可以提升自动驾驶系统的整体性能和用户体验,并有望减少交通事故的发生,促进智能交通的发展。
📄 摘要(原文)
This paper presents a novel trajectory planning pipeline for complex driving scenarios like autonomous lane changing, by integrating risk-aware planning with guaranteed collision avoidance into a unified optimization framework. We first construct a dynamic risk fields (DRF) that captures both the static and dynamic collision risks from surrounding vehicles. Then, we develop a rigorous strategy for generating time-varying convex feasible spaces that ensure kinematic feasibility and safety requirements. The trajectory planning problem is formulated as a finite-horizon optimal control problem and solved using a constrained iterative Linear Quadratic Regulator (iLQR) algorithm that jointly optimizes trajectory smoothness, control effort, and risk exposure while maintaining strict feasibility. Extensive simulations demonstrate that our method outperforms traditional approaches in terms of safety and efficiency, achieving collision-free trajectories with shorter lane-changing distances (28.59 m) and times (2.84 s) while maintaining smooth and comfortable acceleration patterns. In dense roundabout environments the planner further demonstrates robust adaptability, producing larger safety margins, lower jerk, and superior curvature smoothness compared with APF, MPC, and RRT based baselines. These results confirm that the integrated DRF with convex feasible space and constrained iLQR solver provides a balanced solution for safe, efficient, and comfortable trajectory generation in dynamic and interactive traffic scenarios.