FORWARD: Dataset of a forwarder operating in rough terrain
作者: Mikael Lundbäck, Erik Wallin, Carola Häggström, Mattias Nyström, Andreas Grönlund, Mats Richardson, Petrus Jönsson, William Arnvik, Lucas Hedström, Arvid Fälldin, Martin Servin
分类: cs.RO, cs.AI, cs.CE, cs.LG, physics.app-ph
发布日期: 2025-11-21 (更新: 2025-12-22)
备注: 28 pages, 22 figures
💡 一句话要点
发布FORWARD数据集,用于林业机械在复杂地形下的感知、控制与仿真研究。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 林业机械 数据集 自主导航 环境感知 机器人 复杂地形 多模态数据
📋 核心要点
- 现有林业机械的自主控制和交通能力研究缺乏高质量、多模态的真实世界数据集。
- FORWARD数据集提供高分辨率的车辆遥测、环境感知和操作员行为数据,助力相关算法开发。
- 数据集包含真实作业场景和控制变量的实验场景,可用于模型训练、仿真验证和性能评估。
📝 摘要(中文)
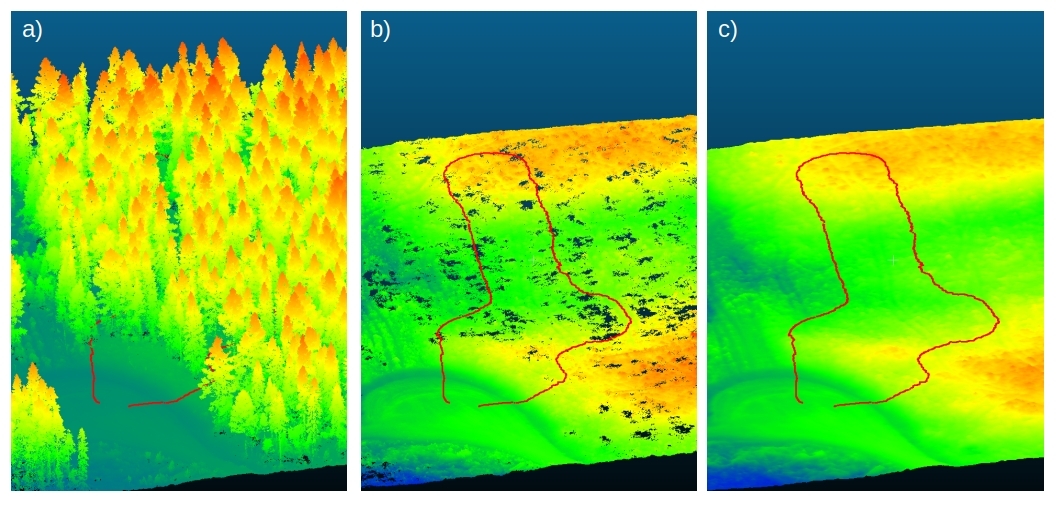
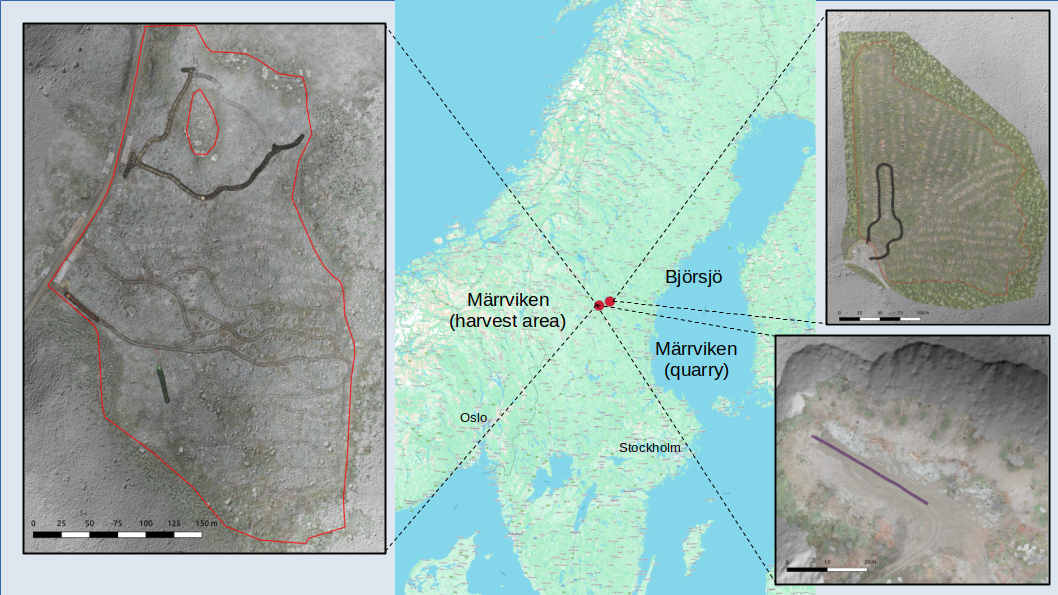
本文介绍了FORWARD,一个高分辨率多模态数据集,记录了一台短材采运机在瑞典中部两个采伐地点的复杂地形中作业的过程。该采运机是一台大型小松型号,配备了车辆远程信息处理传感器,包括卫星导航定位、运动传感器、加速度计和发动机传感器。此外,车辆还配备了摄像头、操作员振动传感器和多个IMU。数据包括以5Hz记录的事件时间日志,包含行驶速度、燃油消耗、厘米级精度的车辆位置以及车辆在森林区域作业时的起重机使用情况,森林区域通过航空激光扫描,分辨率约为每平方米1500个点。数据集中还包括带有时间戳的机器事件的生产日志文件(StanForD标准)、大量的视频材料和各种格式的地形数据。从360度视频材料中注释了约18小时的常规木材提取工作,并将其分解为单独的工作要素。我们还包括在森林道路和地形上进行的实验的场景规范,包括重复行驶相同路线(有无钢轨)、不同负载重量和不同目标行驶速度。该数据集旨在开发用于林业机械的交通能力、感知和自主控制的模型和算法,利用人工智能、仿真和物理试验台。我们特别关注采运机在地形中行驶、避开或处理障碍物以及装卸原木,同时考虑效率、燃油消耗、安全性和环境影响。该开放数据集的其他优势包括能够探索林业机械模拟器的自动生成和校准,以及使用现场记录的数据自动生成自动化场景描述。
🔬 方法详解
问题定义:现有林业机械自主作业的研究面临缺乏真实、全面的数据集的挑战。现有方法难以在复杂地形下实现可靠的感知、规划和控制,并且难以进行有效的仿真和验证。缺乏包含多种传感器数据和详细环境信息的公开数据集阻碍了相关算法的开发和性能提升。
核心思路:本研究的核心思路是通过采集真实林业机械在实际作业环境中的多模态数据,构建一个高质量、高分辨率的数据集。该数据集旨在为林业机械的自主控制、交通能力分析和环境感知算法提供训练和验证的基础。通过提供包含车辆状态、环境信息和操作员行为的全面数据,促进相关领域的研究进展。
技术框架:FORWARD数据集的构建主要包括以下几个阶段:1) 数据采集:使用配备多种传感器的采运机在真实森林环境中进行数据采集,包括车辆遥测数据(速度、燃油消耗、位置等)、环境感知数据(摄像头、IMU、激光雷达)和操作员行为数据(振动传感器)。2) 数据标注:对采集到的视频数据进行人工标注,将作业过程分解为单独的工作要素。3) 数据组织:将采集到的数据按照时间戳进行同步,并整理成易于使用的格式。4) 场景设计:设计包含不同控制变量的实验场景,例如不同负载重量、不同行驶速度和不同地形条件。
关键创新:FORWARD数据集的关键创新在于其高分辨率、多模态和真实性。与现有数据集相比,FORWARD数据集提供了更详细的车辆状态信息、更丰富的环境感知数据和更真实的作业场景。此外,数据集还包含人工标注的作业要素和精心设计的实验场景,为算法开发和性能评估提供了便利。
关键设计:数据集包含以下关键设计:1) 多种传感器:配备车辆遥测传感器、摄像头、IMU和操作员振动传感器,提供全面的数据。2) 高分辨率:航空激光扫描提供每平方米1500个点的地形数据,厘米级精度的车辆位置信息。3) 真实作业场景:在真实森林环境中进行数据采集,包含实际的木材提取作业。4) 人工标注:对视频数据进行人工标注,将作业过程分解为单独的工作要素。5) 实验场景:设计包含不同控制变量的实验场景,用于算法的性能评估。
🖼️ 关键图片

📊 实验亮点
FORWARD数据集包含约18小时的常规木材提取工作,并从360度视频材料中注释为单独的工作要素。数据集包含在森林道路和地形上进行的实验场景规范,包括重复行驶相同路线(有无钢轨)、不同负载重量和不同目标行驶速度。该数据集的分辨率高,航空激光扫描提供每平方米约1500个点的数据。
🎯 应用场景
该数据集可广泛应用于林业机械的自主导航、路径规划、交通能力分析、环境感知和仿真等领域。通过利用该数据集,研究人员可以开发更智能、更高效、更安全的林业机械,从而提高木材采伐效率,降低环境影响,并改善操作员的工作条件。此外,该数据集还可用于开发林业机械的虚拟仿真平台,用于算法验证和操作员培训。
📄 摘要(原文)
We present FORWARD, a high-resolution multimodal dataset of a cut-to-length forwarder operating in rough terrain on two harvest sites in the middle part of Sweden. The forwarder is a large Komatsu model equipped with vehicle telematics sensors, including global positioning via satellite navigation, movement sensors, accelerometers, and engine sensors. The vehicle was additionally equipped with cameras, operator vibration sensors, and multiple IMUs. The data includes event time logs recorded at 5 Hz of driving speed, fuel consumption, vehicle position with centimeter accuracy, and crane use while the vehicle operates in forest areas, aerially laser-scanned with a resolution of around 1500 points per square meter. Production log files (StanForD standard) with time-stamped machine events, extensive video material, and terrain data in various formats are included as well. About 18 hours of regular wood extraction work during three days is annotated from 360-video material into individual work elements and included in the dataset. We also include scenario specifications of conducted experiments on forest roads and in terrain. Scenarios include repeatedly driving the same routes with and without steel tracks, different load weights, and different target driving speeds. The dataset is intended for developing models and algorithms for trafficability, perception, and autonomous control of forest machines using artificial intelligence, simulation, and experiments on physical testbeds. In part, we focus on forwarders traversing terrain, avoiding or handling obstacles, and loading or unloading logs, with consideration for efficiency, fuel consumption, safety, and environmental impact. Other benefits of the open dataset include the ability to explore auto-generation and calibration of forestry machine simulators and automation scenario descriptions using the data recorded in the field.