Volumetric Ergodic Control
作者: Jueun Kwon, Max M. Sun, Todd Murphey
分类: cs.RO, cs.AI
发布日期: 2025-11-14
备注: 8 pages, 8 figures
💡 一句话要点
提出基于体积状态表示的遍历控制方法,提升机器人空间覆盖效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遍历控制 体积状态表示 机器人覆盖 空间规划 机器人操作
📋 核心要点
- 现有遍历控制方法忽略了机器人的体积,导致在实际应用中覆盖效率降低。
- 该论文提出一种基于体积状态表示的遍历控制方法,优化机器人空间覆盖,同时保证渐近覆盖。
- 实验表明,该方法在搜索、操作和机械擦除等任务中,覆盖效率提升超过两倍,任务完成率达100%。
📝 摘要(中文)
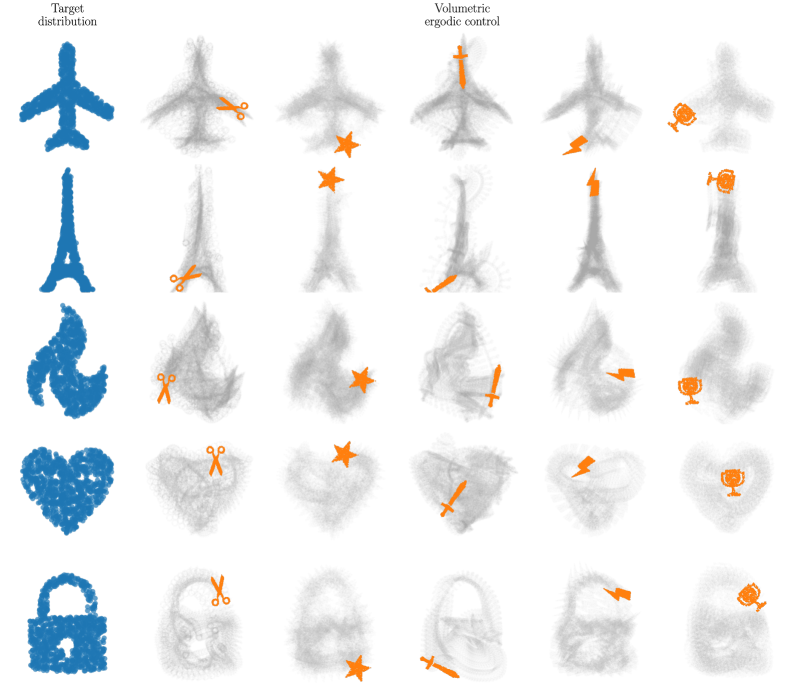
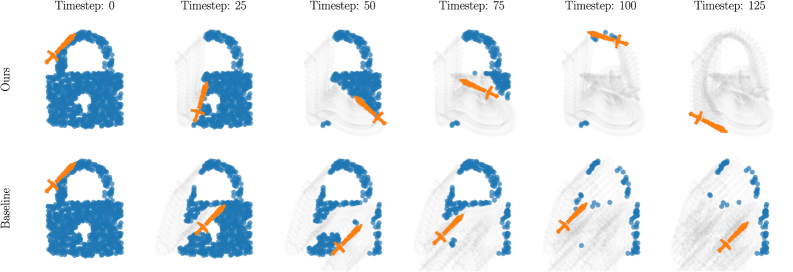
遍历控制旨在为非线性系统合成空间分布上的最优覆盖行为。然而,现有方法将机器人建模为无体积的点,但在实践中,机器人通过具有物理体积的身体和传感器与环境交互。本文提出了一种新的遍历控制公式,该公式使用体积状态表示来优化空间覆盖。该方法保留了遍历控制的渐近覆盖保证,并为实时控制增加了最小的计算开销,同时支持任意的基于采样的体积模型。我们在搜索和操作任务中评估了该方法——使用多种机器人动力学和末端执行器几何形状或传感器模型——结果表明,该方法将覆盖效率提高了两倍以上,并在所有实验中保持了100%的任务完成率,优于标准遍历控制方法。最后,我们展示了该方法在机器人手臂执行机械擦除任务中的有效性。
🔬 方法详解
问题定义:现有遍历控制方法将机器人简化为无体积的点,忽略了机器人实际的物理体积和传感器体积,导致在复杂环境和需要精确操作的任务中,覆盖效率和任务完成度受到限制。特别是当机器人需要与环境进行物理交互时,这种简化会带来显著的性能损失。
核心思路:该论文的核心思路是将机器人的状态表示从一个点扩展到包含体积信息的表示。通过考虑机器人的体积,遍历控制算法可以更准确地规划路径,避免碰撞,并更有效地覆盖目标空间。这种方法旨在保留遍历控制的优点,同时解决其在实际应用中的局限性。
技术框架:该方法的核心是使用体积状态表示来改进遍历控制框架。具体流程包括:1) 使用采样方法(如蒙特卡洛方法)建立机器人的体积模型。2) 将体积模型融入到遍历控制的优化目标中,使得控制策略能够考虑到机器人的体积。3) 设计相应的控制算法,以实现对目标空间的高效覆盖。该框架可以应用于不同的机器人动力学和传感器模型。
关键创新:该论文的关键创新在于将体积信息融入到遍历控制框架中。与传统的点表示方法相比,体积状态表示能够更准确地描述机器人的状态,从而提高覆盖效率和任务完成度。此外,该方法支持任意的基于采样的体积模型,具有很强的通用性。
关键设计:该方法使用基于采样的体积模型来表示机器人的形状和传感器范围。在优化过程中,通过调整控制输入,使得机器人的体积状态能够更好地匹配目标空间分布。具体的损失函数设计需要考虑到覆盖率、碰撞避免以及控制输入的平滑性。此外,为了保证实时性,需要对优化算法进行高效实现。
🖼️ 关键图片
📊 实验亮点
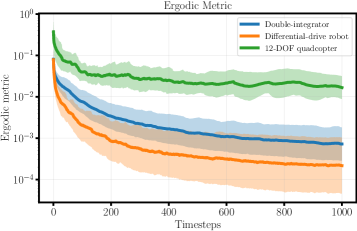
实验结果表明,该方法在搜索和操作任务中,覆盖效率提升超过两倍,并在所有实验中保持了100%的任务完成率,显著优于标准遍历控制方法。在机器人手臂执行机械擦除任务的实验中,也验证了该方法在实际应用中的有效性。这些结果表明,考虑机器人体积对于提高遍历控制的性能至关重要。
🎯 应用场景
该研究成果可广泛应用于机器人搜索、救援、环境监测、自动化清洁、农业机器人等领域。通过考虑机器人的体积,可以提高机器人在复杂环境中的作业效率和安全性。此外,该方法还可以应用于机器人辅助手术、精密装配等需要精确操作的场景,提升任务完成的可靠性。
📄 摘要(原文)
Ergodic control synthesizes optimal coverage behaviors over spatial distributions for nonlinear systems. However, existing formulations model the robot as a non-volumetric point, but in practice a robot interacts with the environment through its body and sensors with physical volume. In this work, we introduce a new ergodic control formulation that optimizes spatial coverage using a volumetric state representation. Our method preserves the asymptotic coverage guarantees of ergodic control, adds minimal computational overhead for real-time control, and supports arbitrary sample-based volumetric models. We evaluate our method across search and manipulation tasks -- with multiple robot dynamics and end-effector geometries or sensor models -- and show that it improves coverage efficiency by more than a factor of two while maintaining a 100% task completion rate across all experiments, outperforming the standard ergodic control method. Finally, we demonstrate the effectiveness of our method on a robot arm performing mechanical erasing tasks.