Scalable Coverage Trajectory Synthesis on GPUs as Statistical Inference
作者: Max M. Sun, Jueun Kwon, Todd Murphey
分类: cs.RO
发布日期: 2025-11-14
备注: Presented at the "Workshop on Fast Motion Planning and Control in the Era of Parallelism" at Robotics: Science and Systems 2025. Workshop website: https://sites.google.com/rice.edu/parallelized-planning-control/
💡 一句话要点
提出基于GPU加速的覆盖轨迹合成方法,解决传统方法计算效率瓶颈。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 覆盖运动规划 流匹配 统计推断 GPU加速 机器人 轨迹合成 并行计算
📋 核心要点
- 传统覆盖运动规划方法在处理轨迹空间分布时效率较低,难以充分利用现代并行计算架构。
- 论文将覆盖运动规划问题转化为统计推断问题,利用流匹配技术解耦轨迹生成和控制合成。
- 该方法通过GPU并行化显著加速计算,在可扩展性方面优于传统的航路点跟踪方法。
📝 摘要(中文)
覆盖运动规划在众多机器人任务中至关重要。与传统的运动规划问题不同,覆盖运动规划需要推理整个轨迹的空间分布,这使得标准的运动规划方法在计算效率上受到限制,并且不太适合现代并行化框架。本文将覆盖运动规划问题从流匹配的角度, формулируем как задачу статистического вывода,流匹配是一种近年来备受关注的生成建模技术。所提出的公式将常用的统计差异度量(如Kullback-Leibler散度和Sinkhorn散度)与标准线性二次调节器问题统一起来。更重要的是,它将覆盖轨迹梯度的生成与非线性系统动力学下的控制合成分离,从而可以通过在现代计算架构(特别是图形处理单元(GPU))上进行并行化来显着加速。本文重点关注这种公式在通过并行化实现可扩展性方面的优势,突出了其与基于航路点跟踪的传统方法相比的计算优势。
🔬 方法详解
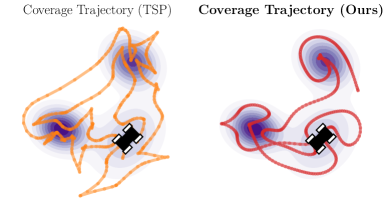
问题定义:覆盖运动规划旨在找到一条轨迹,使机器人能够覆盖目标区域。传统方法,如基于航路点跟踪的方法,需要对轨迹进行离散化,并优化每个航路点,计算量大,难以扩展到复杂环境和高维状态空间。此外,这些方法难以充分利用现代并行计算架构,如GPU,导致计算效率瓶颈。
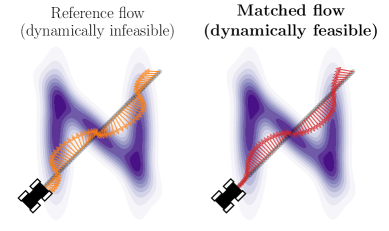
核心思路:论文的核心思路是将覆盖运动规划问题转化为一个统计推断问题,利用流匹配(Flow Matching)这一生成模型技术。通过将轨迹视为概率分布,覆盖问题转化为最小化目标分布和生成分布之间的差异。这种转化允许将轨迹生成和控制合成解耦,从而可以独立地优化轨迹的形状和机器人的控制,为并行化提供了可能。
技术框架:该方法的技术框架主要包含以下几个阶段:1) 将覆盖目标表示为目标轨迹的概率分布;2) 使用流匹配模型学习从初始噪声分布到目标轨迹分布的映射;3) 通过求解线性二次调节器(LQR)问题,将学习到的轨迹梯度转化为控制指令。整个框架允许在GPU上并行计算轨迹梯度,从而加速轨迹生成过程。
关键创新:该方法最重要的创新点在于将覆盖运动规划问题转化为统计推断问题,并利用流匹配技术解耦了轨迹生成和控制合成。这种解耦使得可以在GPU上并行计算轨迹梯度,从而显著提高了计算效率。与传统的基于航路点跟踪的方法相比,该方法不需要对轨迹进行离散化,可以直接优化轨迹的形状,从而可以生成更平滑、更有效的覆盖轨迹。
关键设计:论文的关键设计包括:1) 使用Kullback-Leibler散度或Sinkhorn散度来度量目标分布和生成分布之间的差异;2) 使用线性二次调节器(LQR)来将学习到的轨迹梯度转化为控制指令;3) 利用GPU并行计算轨迹梯度,以加速轨迹生成过程。具体的参数设置和网络结构未知。
🖼️ 关键图片

📊 实验亮点
论文重点强调了该方法在GPU上的并行化优势,通过实验证明,与传统的基于航路点跟踪的方法相比,该方法能够显著提高计算效率,尤其是在处理大规模覆盖任务时。具体的性能数据和提升幅度未知,但论文明确指出该方法在可扩展性方面具有显著优势。
🎯 应用场景
该研究成果可广泛应用于机器人覆盖任务,例如:自动驾驶车辆的道路清扫、无人机的农田巡检、水下机器人的海底勘探等。通过提高覆盖运动规划的效率和可扩展性,可以降低机器人部署成本,提高任务完成效率,并为更复杂的机器人应用提供支持。未来,该方法有望应用于更大规模、更复杂的环境,并与其他机器人技术相结合,实现更智能化的自主覆盖。
📄 摘要(原文)
Coverage motion planning is essential to a wide range of robotic tasks. Unlike conventional motion planning problems, which reason over temporal sequences of states, coverage motion planning requires reasoning over the spatial distribution of entire trajectories, making standard motion planning methods limited in computational efficiency and less amenable to modern parallelization frameworks. In this work, we formulate the coverage motion planning problem as a statistical inference problem from the perspective of flow matching, a generative modeling technique that has gained significant attention in recent years. The proposed formulation unifies commonly used statistical discrepancy measures, such as Kullback-Leibler divergence and Sinkhorn divergence, with a standard linear quadratic regulator problem. More importantly, it decouples the generation of trajectory gradients for coverage from the synthesis of control under nonlinear system dynamics, enabling significant acceleration through parallelization on modern computational architectures, particularly Graphics Processing Units (GPUs). This paper focuses on the advantages of this formulation in terms of scalability through parallelization, highlighting its computational benefits compared to conventional methods based on waypoint tracking.