Stable and Robust SLIP Model Control via Energy Conservation-Based Feedback Cancellation for Quadrupedal Applications
作者: Muhammad Saud Ul Hassan, Derek Vasquez, Hamza Asif, Christian Hubicki
分类: cs.RO
发布日期: 2025-11-07
💡 一句话要点
提出基于能量守恒反馈取消的SLIP模型控制,用于四足机器人稳定运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 SLIP模型 能量守恒 反馈控制 动态运动 鲁棒控制 步态生成
📋 核心要点
- 现有四足机器人运动控制方法在动态性和鲁棒性方面存在不足,难以适应复杂环境。
- 该论文提出基于能量守恒的反馈取消控制架构,利用SLIP模型简化机器人动力学,实现稳定步态。
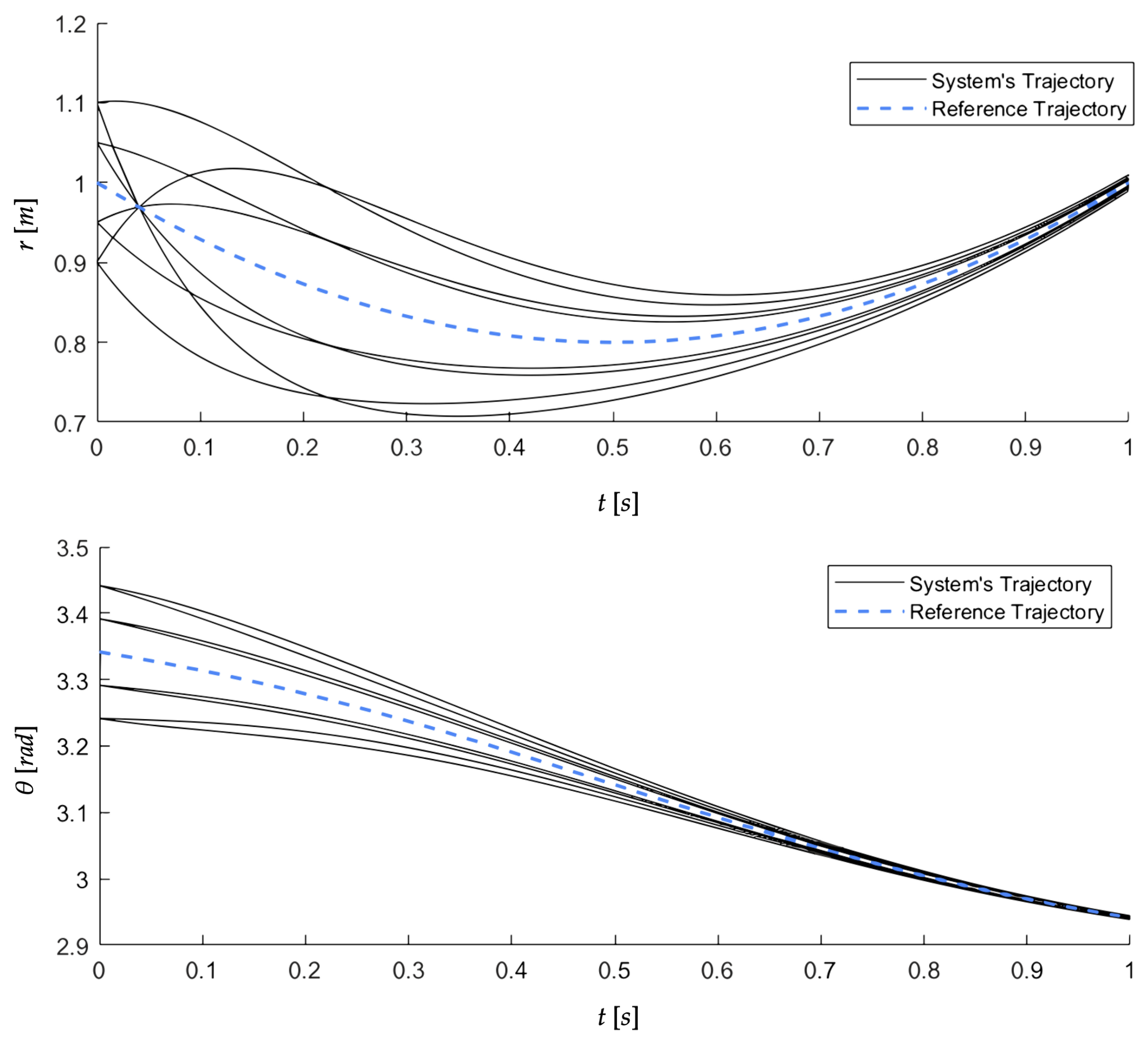
- 仿真结果表明,该控制算法能够生成稳定的弹跳步态,并对传感器误差具有较强的鲁棒性。
📝 摘要(中文)
本文提出了一种基于能量守恒的控制架构,用于实现四足机器人的稳定动态运动。我们将机器人建模为弹簧负载倒立摆(SLIP),该模型非常适合表示各种生物四足动物和仿生机器人系统中常见的跑步步态的弹跳运动特性。该模型允许在飞行阶段进行腿部方向控制,在站立阶段进行腿部长度控制,这种设计选择受到了自然四足动物行为的启发,并在机器人四足系统中普遍存在。我们的控制算法利用四足机器人的降阶SLIP动力学来跟踪站立期间的稳定抛物线样条,该样条是使用能量守恒原理计算得出的。通过基于实际四足机器人Ghost Robotics Minitaur的设计规范进行的仿真,我们证明了我们的控制算法可以生成稳定的弹跳步态。此外,我们还展示了我们的控制器在面对高达10%的传感器测量误差时仍能保持稳定弹跳的能力。
🔬 方法详解
问题定义:现有的四足机器人控制方法在动态运动和鲁棒性方面存在挑战,尤其是在面对传感器噪声和环境变化时。传统的控制方法可能难以保证机器人的稳定性和运动效率。因此,需要一种能够适应复杂环境并保持稳定运动的控制策略。
核心思路:本文的核心思路是利用能量守恒原理来设计控制算法,通过控制腿部方向和长度,使机器人能够跟踪一个稳定的抛物线样条轨迹。这种方法基于SLIP模型,简化了机器人的动力学,使得控制算法更加高效和易于实现。能量守恒保证了运动的稳定性,而反馈取消则用于补偿模型误差和外部干扰。
技术框架:该控制架构主要包含以下几个模块:1) SLIP模型:将四足机器人简化为弹簧负载倒立摆模型,用于描述机器人的运动状态。2) 能量守恒模块:利用能量守恒原理计算出稳定的抛物线样条轨迹,作为期望轨迹。3) 腿部控制模块:控制腿部的方向和长度,使机器人能够跟踪期望轨迹。4) 反馈取消模块:用于补偿模型误差和外部干扰,提高控制器的鲁棒性。
关键创新:该论文的关键创新在于将能量守恒原理与反馈取消相结合,设计了一种鲁棒的四足机器人控制算法。与传统的基于力或位置的控制方法不同,该方法直接利用能量守恒来保证运动的稳定性,从而提高了控制器的性能。此外,该方法还考虑了传感器误差的影响,并通过反馈取消来减小误差的影响。
关键设计:关键设计包括:1) SLIP模型的参数选择,需要根据实际机器人的物理参数进行调整。2) 抛物线样条轨迹的生成,需要根据期望的运动速度和高度进行优化。3) 腿部控制器的设计,需要考虑腿部的动力学特性和控制精度。4) 反馈取消器的设计,需要根据模型误差和外部干扰的特性进行调整。
🖼️ 关键图片
📊 实验亮点
通过在Ghost Robotics Minitaur机器人设计规范基础上进行的仿真实验,验证了所提出的控制算法能够生成稳定的弹跳步态。实验结果表明,即使在传感器测量存在高达10%的误差的情况下,该控制器仍然能够保持稳定的弹跳运动,展示了其良好的鲁棒性。
🎯 应用场景
该研究成果可应用于搜索救援、物流运输、地形勘探等领域。稳定的动态运动控制能够使四足机器人在复杂地形下高效安全地执行任务。此外,该研究为四足机器人的自主导航和人机协作提供了技术支持,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
In this paper, we present an energy-conservation based control architecture for stable dynamic motion in quadruped robots. We model the robot as a Spring-loaded Inverted Pendulum (SLIP), a model well-suited to represent the bouncing motion characteristic of running gaits observed in various biological quadrupeds and bio-inspired robotic systems. The model permits leg-orientation control during flight and leg-length control during stance, a design choice inspired by natural quadruped behaviors and prevalent in robotic quadruped systems. Our control algorithm uses the reduced-order SLIP dynamics of the quadruped to track a stable parabolic spline during stance, which is calculated using the principle of energy conservation. Through simulations based on the design specifications of an actual quadruped robot, Ghost Robotics Minitaur, we demonstrate that our control algorithm generates stable bouncing gaits. Additionally, we illustrate the robustness of our controller by showcasing its ability to maintain stable bouncing even when faced with up to a 10% error in sensor measurements.