A Step Toward World Models: A Survey on Robotic Manipulation
作者: Peng-Fei Zhang, Ying Cheng, Xiaofan Sun, Shijie Wang, Fengling Li, Lei Zhu, Heng Tao Shen
分类: cs.RO, cs.CV
发布日期: 2025-10-31 (更新: 2025-11-10)
备注: 24 pages, 5 figures
💡 一句话要点
机器人操作中的世界模型综述:探索通用智能体的构建基石
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 世界模型 机器人操作 自主智能体 环境建模 预测控制
📋 核心要点
- 现有机器人操作方法难以应对复杂动态环境,缺乏对环境内在机制的理解,限制了其泛化能力。
- 本综述通过分析机器人操作中的方法,考察了展现世界模型核心能力的方法,提炼了世界模型应具备的核心组件。
- 该研究旨在推动机器人领域中通用且实用的世界模型的发展,为构建更智能、更自主的机器人系统奠定基础。
📝 摘要(中文)
自主智能体越来越需要在复杂、动态和不确定的环境中运行,执行诸如操作、导航和决策等任务。实现这些能力要求智能体理解世界的底层机制和动态,超越反应式控制或简单地复制观察到的状态。这推动了世界模型的发展,世界模型作为内部表征,编码环境状态,捕获动态,并支持预测、规划和推理。尽管人们对世界模型的兴趣日益浓厚,但其定义、范围、架构和基本能力仍然模糊。本综述超越了规定固定定义并将范围限制于明确标记为世界模型的方法。相反,我们通过回顾机器人操作中的方法,考察了展现世界模型核心能力的方法。我们分析了它们在感知、预测和控制中的作用,识别了关键挑战和解决方案,并提炼了完全实现的世界模型应具备的核心组件、能力和功能。基于此分析,我们旨在推动进一步开发用于机器人的通用且实用的世界模型。
🔬 方法详解
问题定义:现有机器人操作方法通常依赖于反应式控制或简单状态复制,难以适应复杂、动态和不确定的环境。这些方法缺乏对环境内在机制和动态的理解,导致泛化能力不足,难以完成复杂的操纵任务。因此,需要一种能够编码环境状态、捕获动态并支持预测、规划和推理的内部表征,即世界模型。
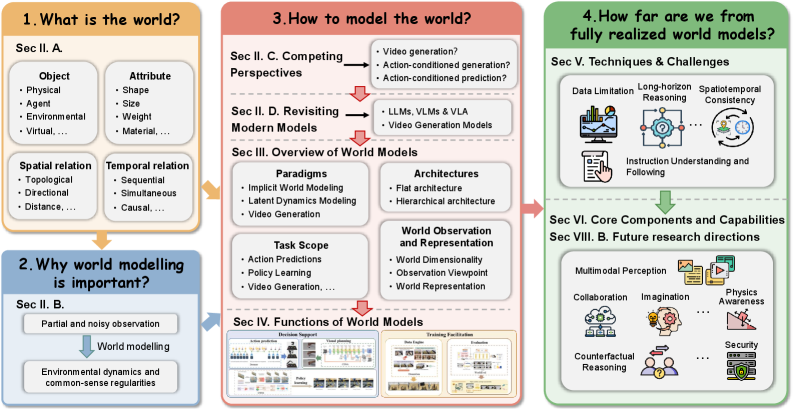
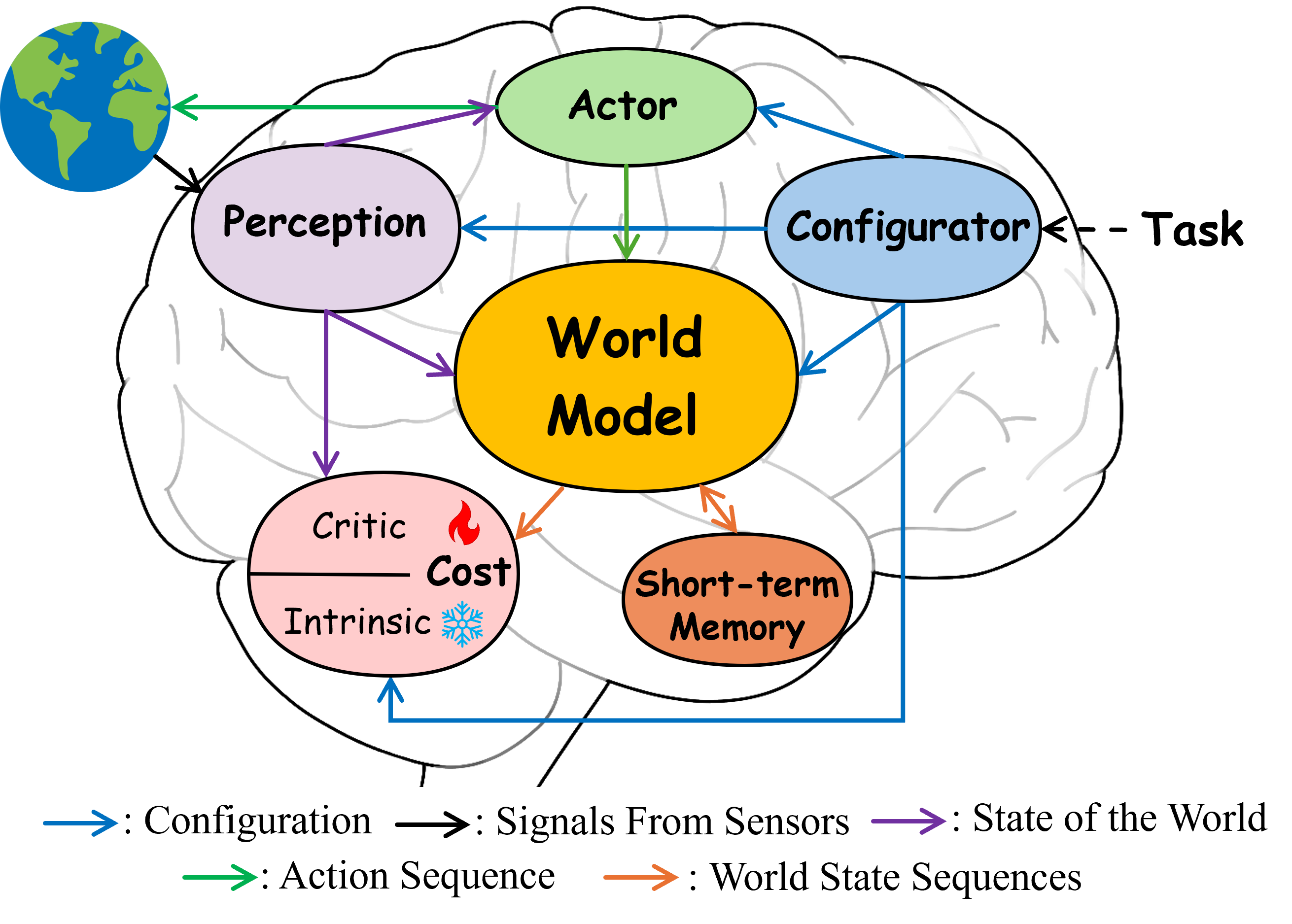
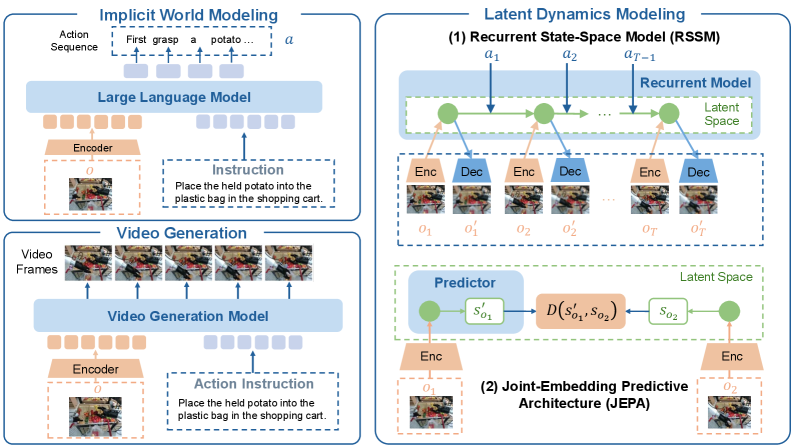
核心思路:本综述的核心思路是通过分析机器人操作领域中已有的方法,提取并总结出世界模型应具备的核心能力和组件。作者没有局限于明确标记为“世界模型”的方法,而是考察了那些展现出世界模型核心能力的方法,例如感知、预测和控制。通过这种方式,可以更全面地理解世界模型的概念和实现方式。
技术框架:本综述的技术框架主要包括三个方面:感知、预测和控制。首先,分析了机器人操作中常用的感知方法,例如视觉感知、触觉感知等,以及如何将感知信息编码到世界模型中。其次,考察了各种预测模型,例如基于物理的预测模型、基于学习的预测模型等,以及如何利用这些模型预测环境的未来状态。最后,分析了如何利用世界模型进行控制,例如模型预测控制、强化学习等。
关键创新:本综述的关键创新在于它没有给出一个固定的世界模型定义,而是通过分析机器人操作中的各种方法,提炼出世界模型应具备的核心能力和组件。这种方法更加灵活和实用,可以更好地指导未来世界模型的研究和开发。此外,该综述还强调了世界模型在机器人操作中的重要性,并指出了未来研究的潜在方向。
关键设计:本综述没有涉及具体的技术细节,而是侧重于对现有方法的分析和总结。然而,作者在文中提到了各种常用的技术,例如卷积神经网络、循环神经网络、高斯过程、卡尔曼滤波等。这些技术可以用于构建世界模型的各个模块,例如感知模块、预测模块和控制模块。
🖼️ 关键图片
📊 实验亮点
该综述没有提供具体的实验结果,而是对机器人操作领域中已有的方法进行了全面的分析和总结。通过分析这些方法,作者提炼出了世界模型应具备的核心能力和组件,并指出了未来研究的潜在方向。例如,作者强调了世界模型在机器人操作中的重要性,并指出未来研究应该关注如何构建更加通用和鲁棒的世界模型。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如工业自动化、家庭服务、医疗辅助等。通过构建能够理解环境动态和进行预测的世界模型,机器人可以更好地适应复杂和不确定的环境,从而完成更加复杂的操纵任务。此外,该研究还可以促进通用人工智能的发展,为构建更智能、更自主的机器人系统奠定基础。
📄 摘要(原文)
Autonomous agents are increasingly expected to operate in complex, dynamic, and uncertain environments, performing tasks such as manipulation, navigation, and decision-making. Achieving these capabilities requires agents to understand the underlying mechanisms and dynamics of the world, moving beyond reactive control or simple replication of observed states. This motivates the development of world models as internal representations that encode environmental states, capture dynamics, and support prediction, planning, and reasoning. Despite growing interest, the definition, scope, architectures, and essential capabilities of world models remain ambiguous. In this survey, we go beyond prescribing a fixed definition and limiting our scope to methods explicitly labeled as world models. Instead, we examine approaches that exhibit the core capabilities of world models through a review of methods in robotic manipulation. We analyze their roles across perception, prediction, and control, identify key challenges and solutions, and distill the core components, capabilities, and functions that a fully realized world model should possess. Building on this analysis, we aim to motivate further development toward generalizable and practical world models for robotics.