MobiDock: Design and Control of A Modular Self Reconfigurable Bimanual Mobile Manipulator via Robotic Docking
作者: Xuan-Thuan Nguyen, Khac Nam Nguyen, Ngoc Duy Tran, Thi Thoa Mac, Anh Nguyen, Hoang Hiep Ly, Tung D. Ta
分类: cs.RO
发布日期: 2025-10-31
备注: ICRA2026 submited
💡 一句话要点
MobiDock:通过机器人对接实现模块化自重构双臂移动操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模块化机器人 自重构系统 移动操作 机器人对接 计算机视觉 AprilTag 动态稳定性 协同控制
📋 核心要点
- 多机器人系统在协同操作时面临控制协调和动态稳定性的难题,限制了其在复杂任务中的应用。
- MobiDock通过物理对接将多个独立机器人重构为一个统一的平台,简化了控制并提升了整体系统的性能。
- 实验表明,MobiDock对接后的系统在动态稳定性、操作精度和任务完成速度方面均优于独立协作的机器人。
📝 摘要(中文)
本研究提出了MobiDock,一个模块化自重构移动操作机器人系统,旨在解决多机器人系统,特别是移动操作机器人在协同工作时面临的控制协调和动态稳定性挑战。MobiDock允许两个独立的机器人通过物理连接形成一个统一的移动双臂平台。这种连接将复杂的多机器人控制问题简化为对单个系统的管理。该系统采用基于计算机视觉(使用AprilTag标记)和新型螺纹锁紧机构的自主对接策略。实验结果表明,与两个独立协作的机器人相比,对接后的配置在动态稳定性和操作效率方面表现更好。具体而言,统一系统的均方根(RMS)加速度和加加速度值更低,角度精度更高,并且完成任务的速度明显更快。这些发现证实,物理重构是一种强大的设计原则,可以简化协同控制,从而提高复杂任务在实际环境中的稳定性和性能。
🔬 方法详解
问题定义:多机器人系统,尤其是移动操作机器人,在协同工作时面临控制协调和动态稳定性的挑战。现有方法通常依赖复杂的软件控制算法来实现多机器人之间的协调,但这些方法难以保证系统的动态稳定性,并且在复杂环境中容易出现误差累积。因此,需要一种更可靠、更高效的方法来实现多机器人的协同操作。
核心思路:MobiDock的核心思路是通过物理连接将两个独立的移动机器人重构为一个统一的平台。这种物理连接将复杂的多机器人控制问题简化为对单个系统的控制,从而提高了系统的动态稳定性,并简化了控制算法的设计。通过自主对接,系统能够灵活地适应不同的任务需求。
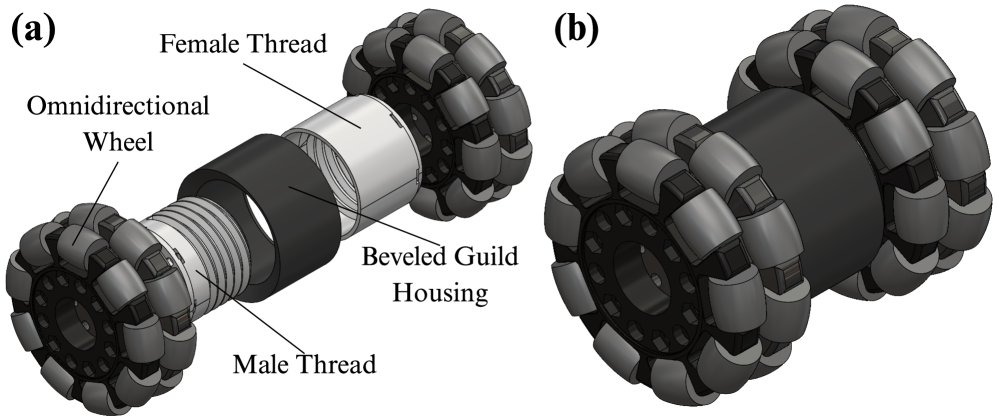
技术框架:MobiDock系统的整体架构包括两个独立的移动机器人,每个机器人配备有移动底盘、机械臂和对接机构。对接过程主要分为以下几个阶段:1) 机器人通过视觉系统(AprilTag)识别对接目标;2) 机器人自主导航到对接位置;3) 机器人通过螺纹锁紧机构实现物理连接。对接完成后,两个机器人作为一个整体进行协同操作。
关键创新:MobiDock最重要的技术创新点在于其模块化自重构的设计理念和基于螺纹锁紧机构的自主对接方法。与传统的软件控制方法相比,物理连接能够更有效地保证系统的动态稳定性。此外,基于AprilTag的视觉引导和螺纹锁紧机构的设计,使得对接过程更加精确和可靠。
关键设计:MobiDock的关键设计包括:1) AprilTag的布局和识别算法,用于精确引导机器人对接;2) 螺纹锁紧机构的设计,保证对接的稳定性和可靠性;3) 控制算法的设计,用于协调两个机器人在对接前后的运动。具体的参数设置和控制算法细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,MobiDock对接后的系统在动态稳定性和操作效率方面显著优于独立协作的机器人。具体而言,统一系统的均方根(RMS)加速度和加加速度值更低,角度精度更高,并且完成任务的速度明显更快。这些数据表明,物理重构能够有效地提高多机器人系统的性能。
🎯 应用场景
MobiDock系统具有广泛的应用前景,例如在大型工件的搬运、复杂环境下的协同操作、以及灾后救援等领域。通过模块化自重构,MobiDock能够灵活地适应不同的任务需求,提高工作效率和安全性。未来,MobiDock有望成为一种通用的多机器人协同操作平台,推动相关领域的发展。
📄 摘要(原文)
Multi-robot systems, particularly mobile manipulators, face challenges in control coordination and dynamic stability when working together. To address this issue, this study proposes MobiDock, a modular self-reconfigurable mobile manipulator system that allows two independent robots to physically connect and form a unified mobile bimanual platform. This process helps transform a complex multi-robot control problem into the management of a simpler, single system. The system utilizes an autonomous docking strategy based on computer vision with AprilTag markers and a new threaded screw-lock mechanism. Experimental results show that the docked configuration demonstrates better performance in dynamic stability and operational efficiency compared to two independently cooperating robots. Specifically, the unified system has lower Root Mean Square (RMS) Acceleration and Jerk values, higher angular precision, and completes tasks significantly faster. These findings confirm that physical reconfiguration is a powerful design principle that simplifies cooperative control, improving stability and performance for complex tasks in real-world environments.