RoboOS-NeXT: A Unified Memory-based Framework for Lifelong, Scalable, and Robust Multi-Robot Collaboration
作者: Huajie Tan, Cheng Chi, Xiansheng Chen, Yuheng Ji, Zhongxia Zhao, Xiaoshuai Hao, Yaoxu Lyu, Mingyu Cao, Junkai Zhao, Huaihai Lyu, Enshen Zhou, Ning Chen, Yankai Fu, Cheng Peng, Wei Guo, Dong Liang, Zhuo Chen, Mengsi Lyu, Chenrui He, Yulong Ao, Yonghua Lin, Pengwei Wang, Zhongyuan Wang, Shanghang Zhang
分类: cs.RO
发布日期: 2025-10-30
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
RoboOS-NeXT:用于终身、可扩展和鲁棒多机器人协作的统一内存框架
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人协作 终身学习 可扩展性 鲁棒性 时空具身记忆 大脑-小脑框架 共享记忆
📋 核心要点
- 现有VLA模型和分层框架在多智能体协作中,因依赖有限记忆,难以实现长期学习、异构扩展和故障恢复。
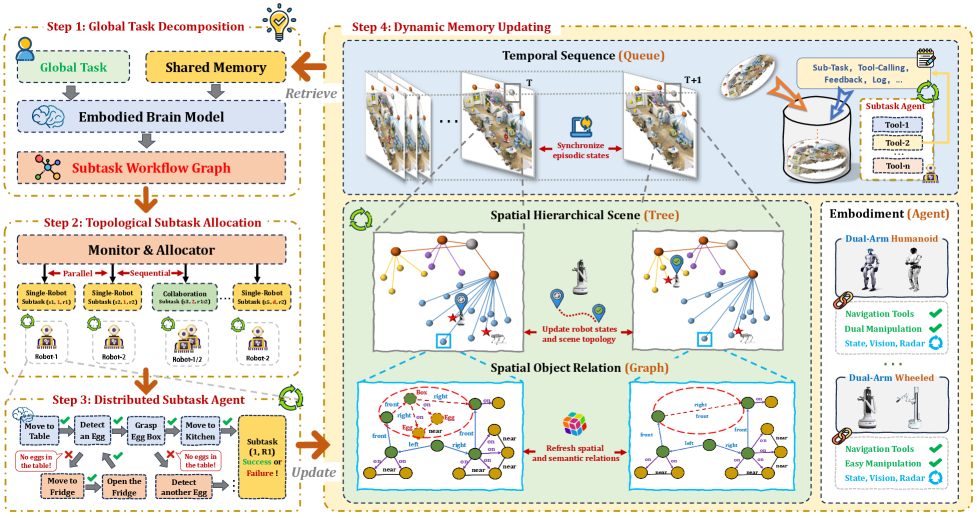
- RoboOS-NeXT提出时空具身记忆(STEM),整合空间、时间、具身信息,构建共享表示,实现全局规划和局部执行的闭环。
- 实验表明,RoboOS-NeXT在餐厅、超市和家庭等场景中,对异构机器人表现出卓越的性能,验证了其有效性。
📝 摘要(中文)
本文提出RoboOS-NeXT,一个基于统一内存的框架,旨在解决多智能体系统中终身适应性、可扩展协调和鲁棒调度等挑战。现有方法,如视觉-语言-动作模型和分层框架,由于依赖有限或个体智能体记忆,无法实现长期学习、异构团队扩展或故障恢复。RoboOS-NeXT的核心是新型时空具身记忆(STEM),它将空间场景几何、时间事件历史和具身轮廓集成到共享表示中。这种以记忆为中心的设计集成到大脑-小脑框架中,其中高级大脑模型通过检索和更新STEM执行全局规划,而低级控制器在本地执行动作。认知、记忆和执行之间的闭环实现了动态任务分配、容错协作和一致的状态同步。在餐厅、超市和家庭等复杂协调任务中进行的大量实验表明,RoboOS-NeXT在异构具身方面表现出卓越的性能,验证了其在实现终身、可扩展和鲁棒的多机器人协作方面的有效性。
🔬 方法详解
问题定义:多机器人协作面临终身学习、可扩展性和鲁棒性的挑战。现有方法依赖于有限的或个体智能体的记忆,无法有效地进行长期学习,难以扩展到异构机器人团队,并且在出现故障时缺乏有效的恢复机制。这些局限性阻碍了多机器人系统在复杂和动态环境中的广泛应用。
核心思路:RoboOS-NeXT的核心思路是构建一个统一的、共享的记忆表示,即时空具身记忆(STEM)。通过将空间场景几何、时间事件历史和具身轮廓信息整合到STEM中,系统能够更好地理解环境、跟踪事件和协调不同机器人的行为。这种共享记忆的设计使得机器人能够协同学习,并更容易地适应新的任务和环境。
技术框架:RoboOS-NeXT采用大脑-小脑框架。高级“大脑”模型负责全局规划,通过检索和更新STEM来制定任务策略。低级“小脑”控制器负责本地执行,根据全局规划执行具体的动作。这种分层架构使得系统能够有效地处理复杂任务,同时保持鲁棒性和实时性。整个系统通过认知、记忆和执行之间的闭环进行优化,实现动态任务分配、容错协作和一致的状态同步。
关键创新:RoboOS-NeXT的关键创新在于提出了时空具身记忆(STEM),这是一种统一的记忆表示,能够整合空间、时间和具身信息。与传统的基于个体记忆的方法相比,STEM能够实现更有效的知识共享和协同学习。此外,大脑-小脑框架的设计使得系统能够同时进行全局规划和局部执行,提高了系统的效率和鲁棒性。
关键设计:STEM的具体实现细节未知,论文中可能没有详细描述其数据结构和更新机制。大脑-小脑模型的具体网络结构和训练方法也未知。损失函数的设计可能涉及到对全局规划和局部执行的优化,以及对记忆一致性的约束。这些细节需要参考论文的补充材料或代码才能进一步了解。
🖼️ 关键图片
📊 实验亮点
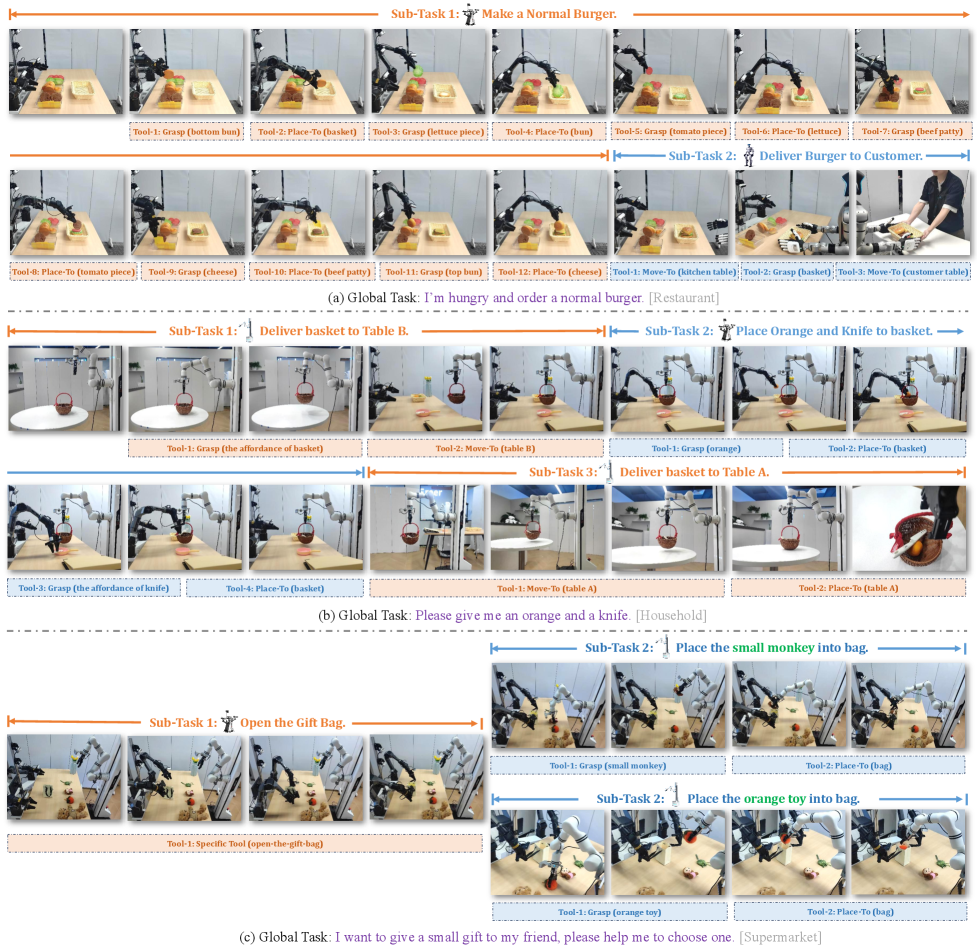
RoboOS-NeXT在餐厅、超市和家庭等复杂协调任务中进行了广泛的实验验证。实验结果表明,RoboOS-NeXT在异构具身方面表现出卓越的性能,验证了其在实现终身、可扩展和鲁棒的多机器人协作方面的有效性。具体的性能数据和对比基线未知,需要参考论文原文。
🎯 应用场景
RoboOS-NeXT具有广泛的应用前景,可应用于餐厅、超市、家庭等复杂环境中的多机器人协作任务。例如,在餐厅中,多个机器人可以协同完成点餐、送餐和清洁等任务。在超市中,机器人可以协同进行商品盘点、货架整理和顾客引导。在家庭环境中,机器人可以协同完成家务、照顾老人和儿童等任务。该研究有望推动多机器人系统在服务、制造和物流等领域的应用。
📄 摘要(原文)
The proliferation of collaborative robots across diverse tasks and embodiments presents a central challenge: achieving lifelong adaptability, scalable coordination, and robust scheduling in multi-agent systems. Existing approaches, from vision-language-action (VLA) models to hierarchical frameworks, fall short due to their reliance on limited or dividual-agent memory. This fundamentally constrains their ability to learn over long horizons, scale to heterogeneous teams, or recover from failures, highlighting the need for a unified memory representation. To address these limitations, we introduce RoboOS-NeXT, a unified memory-based framework for lifelong, scalable, and robust multi-robot collaboration. At the core of RoboOS-NeXT is the novel Spatio-Temporal-Embodiment Memory (STEM), which integrates spatial scene geometry, temporal event history, and embodiment profiles into a shared representation. This memory-centric design is integrated into a brain-cerebellum framework, where a high-level brain model performs global planning by retrieving and updating STEM, while low-level controllers execute actions locally. This closed loop between cognition, memory, and execution enables dynamic task allocation, fault-tolerant collaboration, and consistent state synchronization. We conduct extensive experiments spanning complex coordination tasks in restaurants, supermarkets, and households. Our results demonstrate that RoboOS-NeXT achieves superior performance across heterogeneous embodiments, validating its effectiveness in enabling lifelong, scalable, and robust multi-robot collaboration. Project website: https://flagopen.github.io/RoboOS/