Adaptive Trajectory Refinement for Optimization-based Local Planning in Narrow Passages
作者: Hahjin Lee, Young J. Kim
分类: cs.RO
发布日期: 2025-10-30
💡 一句话要点
提出自适应轨迹优化算法,解决移动机器人在狭窄通道中的局部规划问题
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 轨迹规划 局部规划 移动机器人 碰撞避免 狭窄通道
📋 核心要点
- 传统方法在狭窄通道中进行移动机器人轨迹规划时,容易失败或产生次优路径,难以保证安全性和效率。
- 提出一种自适应轨迹优化算法,通过分段碰撞测试和姿态校正,确保路径段和姿态级别的安全性。
- 仿真和真实实验表明,该方法在狭窄通道中显著提高了规划成功率和速度,验证了其有效性。
📝 摘要(中文)
本文提出了一种自适应轨迹优化算法,旨在解决移动机器人在复杂环境中,尤其是在狭窄通道内的轨迹规划难题。该算法包含两个主要阶段。首先,为了确保路径段级别的安全性,采用分段保守碰撞测试,递归地细分高风险轨迹段,直至消除碰撞风险。其次,为了保证姿态级别的安全,应用基于穿透方向和线搜索的姿态校正,确保轨迹中的每个姿态都是无碰撞的,并且与障碍物保持最大程度的距离。仿真结果表明,与最先进的方法相比,该方法成功率提高了1.69倍,规划速度提高了3.79倍。此外,真实世界的实验证实,该机器人能够在保持快速规划性能的同时,安全地通过狭窄通道。
🔬 方法详解
问题定义:论文旨在解决移动机器人在复杂环境中,尤其是在狭窄通道内进行局部轨迹规划时面临的挑战。现有方法在狭窄通道中容易失效,或者生成的轨迹并非最优,无法同时保证安全性和规划效率。现有方法在处理复杂环境时,计算复杂度高,难以满足实时性要求。
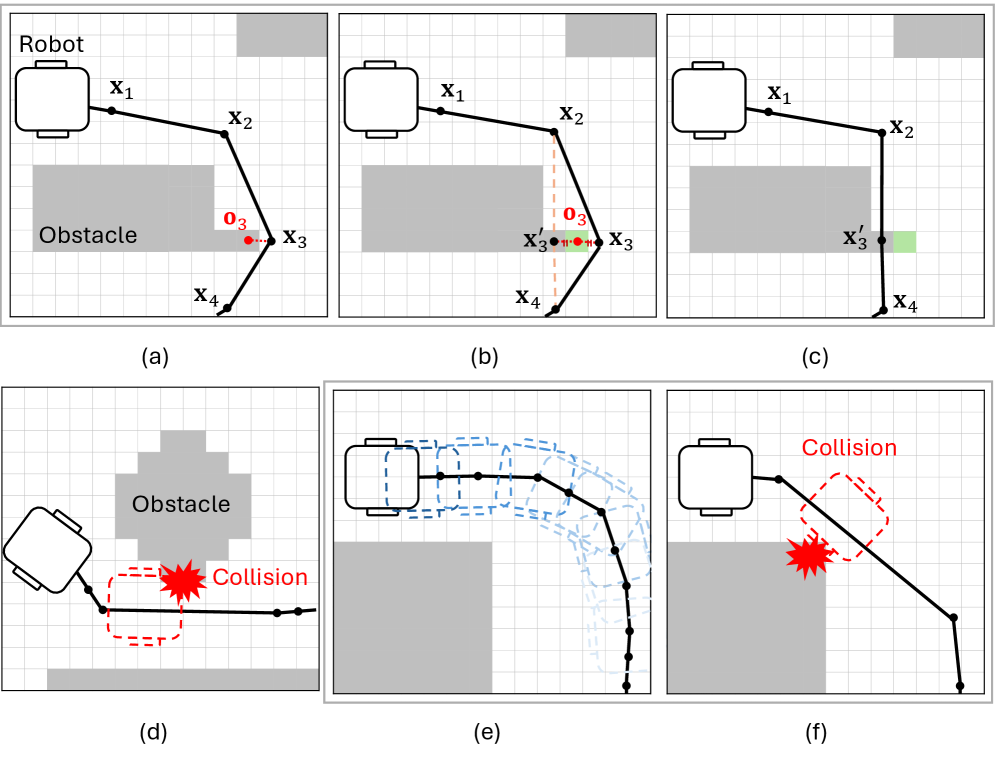
核心思路:论文的核心思路是通过自适应地优化轨迹,确保在路径段和姿态两个层面上都具有安全性。具体来说,首先通过保守的碰撞检测方法识别并细分高风险的轨迹段,然后通过姿态校正方法调整每个姿态,使其远离障碍物。这种分层优化的策略能够在保证安全性的前提下,提高规划效率。
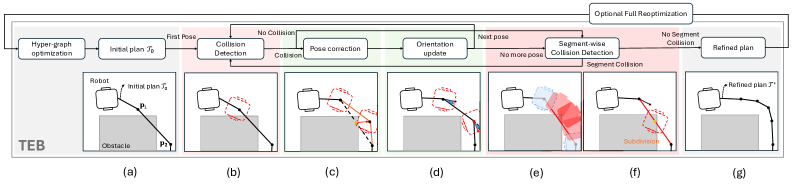
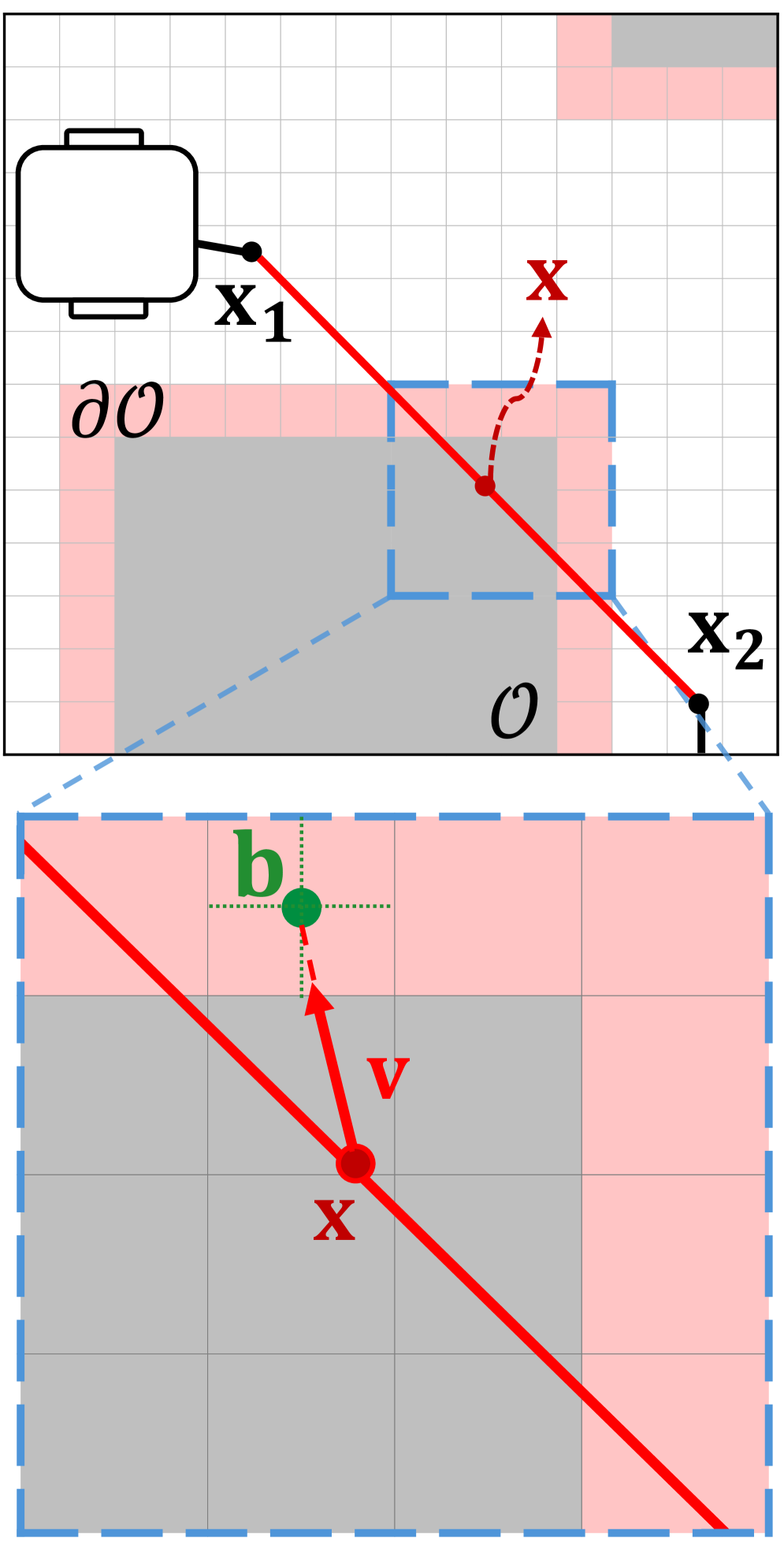
技术框架:该算法主要包含两个阶段:1) 分段保守碰撞测试:对轨迹的每个路径段进行碰撞检测,如果检测到碰撞风险,则递归地将该路径段细分,直到碰撞风险消除。2) 姿态校正:基于穿透方向和线搜索,对轨迹中的每个姿态进行校正,使其远离障碍物,并保证轨迹的平滑性。这两个阶段迭代进行,直到轨迹满足安全性和优化目标。
关键创新:该方法最重要的创新点在于其自适应的轨迹优化策略。与传统的全局规划方法不同,该方法能够根据环境的复杂程度,动态地调整轨迹的优化过程。通过分段碰撞测试和姿态校正,能够有效地处理狭窄通道等复杂环境,并保证轨迹的安全性和效率。
关键设计:在分段碰撞测试中,采用保守的碰撞检测方法,以确保安全性。在姿态校正中,使用基于穿透方向的线搜索方法,以快速找到无碰撞的姿态。算法中涉及到一些参数,例如细分阈值、线搜索步长等,这些参数需要根据具体的应用场景进行调整,以达到最佳的性能。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,与现有技术相比,该方法在狭窄通道中的规划成功率提高了1.69倍,规划速度提高了3.79倍。真实环境实验也验证了该方法在实际应用中的有效性,机器人能够在保持快速规划性能的同时,安全地通过狭窄通道。这些实验结果充分证明了该算法在复杂环境下的优越性。
🎯 应用场景
该研究成果可应用于各种需要在复杂环境中进行自主导航的移动机器人,例如仓储物流机器人、家庭服务机器人、以及在狭窄空间内进行作业的工业机器人。该算法能够提高机器人在复杂环境中的安全性和效率,降低人工干预的需求,具有重要的实际应用价值和商业前景。
📄 摘要(原文)
Trajectory planning for mobile robots in cluttered environments remains a major challenge due to narrow passages, where conventional methods often fail or generate suboptimal paths. To address this issue, we propose the adaptive trajectory refinement algorithm, which consists of two main stages. First, to ensure safety at the path-segment level, a segment-wise conservative collision test is applied, where risk-prone trajectory path segments are recursively subdivided until collision risks are eliminated. Second, to guarantee pose-level safety, pose correction based on penetration direction and line search is applied, ensuring that each pose in the trajectory is collision-free and maximally clear from obstacles. Simulation results demonstrate that the proposed method achieves up to 1.69x higher success rates and up to 3.79x faster planning times than state-of-the-art approaches. Furthermore, real-world experiments confirm that the robot can safely pass through narrow passages while maintaining rapid planning performance.