Embodied Intelligence for Advanced Bioinspired Microrobotics: Examples and Insights
作者: Nestor O. Perez-Arancibia
分类: cs.RO
发布日期: 2025-10-30
备注: 8 pages, 7 figures, accepted to ICAR 2025
💡 一句话要点
基于具身智能的微型机器人设计,实现高效自主运动与导航
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 具身智能 微型机器人 协同设计 自主运动 生物启发
📋 核心要点
- 传统微型机器人设计通常将感知、计算和执行分离,导致系统复杂且效率低下,难以适应复杂环境。
- 本文提出基于具身智能的协同设计方法,将智能行为融入机器人物理结构和材料属性,简化控制并提高鲁棒性。
- 通过一系列微型机器人实例,展示了具身智能在运动、导航和环境交互方面的优势,验证了该方法的有效性。
📝 摘要(中文)
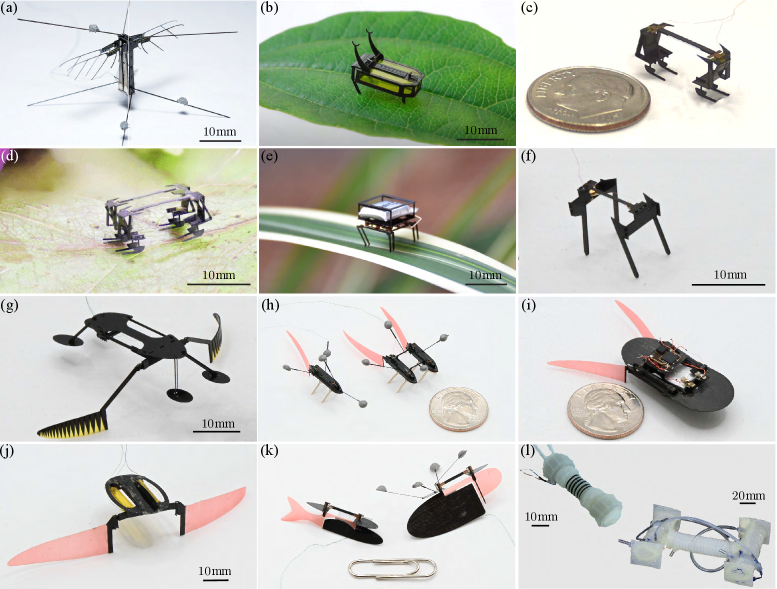
本文探讨了具身智能(EI)作为先进微型机器人设计原则的应用,重点关注物理结构和行为功能的协同设计。具身智能的核心思想是将机器人形态、材料属性、环境交互和控制策略整合到机器人设计中,从而产生智能行为,特别是运动和导航。为了区分EI驱动的系统与传统解耦感知、计算和执行的架构,本文展示并讨论了作者及其团队在自主微型机器人系统实验室(AMSL)开发的一系列机器人。这些机器人展现了从其结构动力学以及组件与环境之间的物理交互中涌现出的智能行为。Bee++、RoBeetle、SMALLBug、SMARTI、WaterStrider、VLEIBot+和FRISSHBot等平台展示了如何将反馈回路、决策逻辑、传感机制和智能驱动策略嵌入到机器人系统本身的物理属性中。因此,我们认为协同设计不仅是一种约束下的经验优化方法,而且是EI的推动者,为毫米到厘米级机器人提供了一种可扩展且稳健的经典控制替代方案。
🔬 方法详解
问题定义:传统微型机器人设计面临的挑战在于,将感知、计算和执行模块分离导致系统复杂性增加,能源效率降低,并且难以适应动态和非结构化环境。现有的控制方法通常需要大量的传感器数据和复杂的计算,这对于资源受限的微型机器人来说是不切实际的。
核心思路:本文的核心思路是采用具身智能(Embodied Intelligence)的设计原则,将智能行为融入到机器人的物理结构、材料属性以及与环境的交互中。通过巧妙地设计机器人的形态和材料,使其能够利用自身的动力学特性和与环境的物理交互来实现复杂的运动和导航,从而减少对外部传感器和复杂控制算法的依赖。
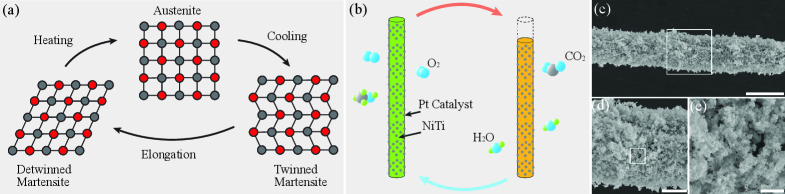
技术框架:本文通过展示一系列由作者团队开发的微型机器人平台来阐述具身智能的设计理念。这些平台包括:Bee++、RoBeetle、SMALLBug、SMARTI、WaterStrider、VLEIBot+和FRISSHBot。每个平台都针对特定的应用场景进行了优化设计,例如,WaterStrider模仿水黾的运动方式,利用表面张力在水面上移动;RoBeetle则通过振动驱动实现地面运动。这些机器人平台的设计都强调物理结构和行为功能的协同发展。
关键创新:本文最重要的技术创新在于强调了协同设计(Co-design)在微型机器人开发中的重要性。协同设计不仅仅是一种优化方法,更是一种实现具身智能的手段。通过同时考虑机器人的物理结构和行为功能,可以创造出具有内在智能的机器人系统,从而避免了传统机器人设计中感知、计算和执行模块之间的信息瓶颈。与现有方法相比,具身智能方法更加注重利用物理原理和环境交互来实现智能行为,而不是依赖于复杂的控制算法。
关键设计:关键设计包括对机器人形态、材料选择和驱动方式的优化。例如,在WaterStrider的设计中,需要精确控制腿部的几何形状和表面特性,以确保其能够有效地利用表面张力进行运动。在RoBeetle的设计中,需要选择合适的材料和振动频率,以实现高效的地面运动。此外,反馈回路、决策逻辑和传感机制也被嵌入到机器人的物理属性中,例如,通过被动机械结构实现自稳定和自适应。
🖼️ 关键图片

📊 实验亮点
论文展示了多个微型机器人的设计案例,例如,WaterStrider能够在水面上稳定运动,RoBeetle能够在复杂地面上高效移动。这些机器人通过巧妙的物理结构设计和材料选择,实现了自主导航和环境交互,验证了具身智能在微型机器人设计中的有效性。虽然论文中没有提供具体的性能数据和对比基线,但这些案例充分展示了具身智能的潜力。
🎯 应用场景
该研究成果可应用于环境监测、医疗诊断、精密制造等领域。例如,微型机器人可以进入狭小空间进行检测和维修,或在人体内进行药物输送和微创手术。具身智能的设计理念有望推动微型机器人技术的发展,使其在复杂和动态环境中更具适应性和自主性,为解决实际问题提供新的解决方案。
📄 摘要(原文)
The term embodied intelligence (EI) conveys the notion that body morphology, material properties, interaction with the environment, and control strategies can be purposefully integrated into the process of robotic design to generate intelligent behavior; in particular, locomotion and navigation. In this paper, we discuss EI as a design principle for advanced microrobotics, with a particular focus on co-design -- the simultaneous and interdependent development of physical structure and behavioral function. To illustrate the contrast between EI-inspired systems and traditional architectures that decouple sensing, computation, and actuation, we present and discuss a collection of robots developed by the author and his team at the Autonomous Microrobotic Systems Laboratory (AMSL). These robots exhibit intelligent behavior that emerges from their structural dynamics and the physical interaction between their components and with the environment. Platforms such as the Bee++, RoBeetle, SMALLBug, SMARTI, WaterStrider, VLEIBot+, and FRISSHBot exemplify how feedback loops, decision logics, sensing mechanisms, and smart actuation strategies can be embedded into the physical properties of the robotic system itself. Along these lines, we contend that co-design is not only a method for empirical optimization under constraints, but also an enabler of EI, offering a scalable and robust alternative to classical control for robotics at the mm-to-cm-scale.