Force Characterization of Insect-Scale Aquatic Propulsion Based on Fluid-Structure Interaction
作者: Conor K. Trygstad, Nestor O. Perez-Arancibia
分类: cs.RO, physics.flu-dyn
发布日期: 2025-10-29
备注: To be presented at ICAR 2025 in San Juan, Argentina
💡 一句话要点
基于流固耦合的昆虫尺度水下推进器力特性研究
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型机器人 水下推进 流固耦合 形状记忆合金 力传感器
📋 核心要点
- 现有昆虫尺度水下推进器缺乏系统性的力特性研究,难以优化推进效率。
- 设计并实验验证了基于流固耦合的单尾和双尾推进器,灵感来源于鳗鱼式游泳。
- 使用定制的微牛级力传感器测量了推进器的最大和周期平均推力,为优化设计提供数据支撑。
📝 摘要(中文)
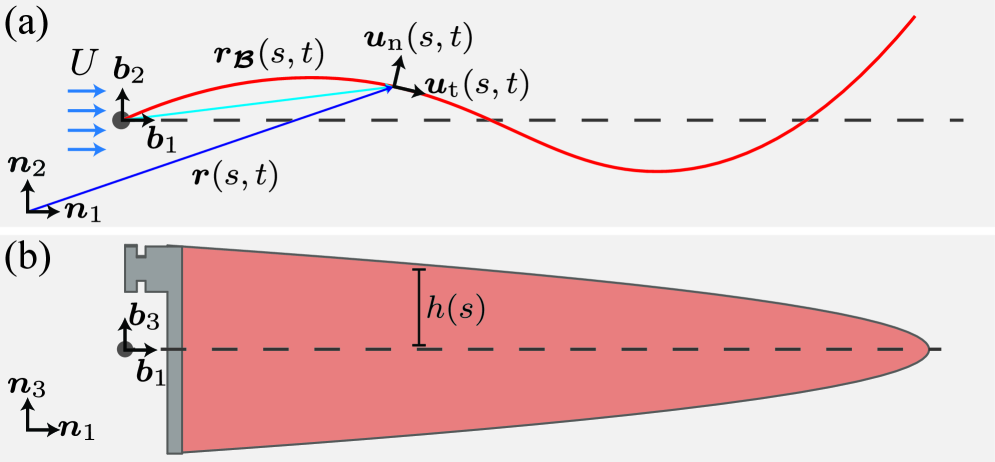
本文针对微型机器人游泳器,提出了两种新型昆虫尺度推进器——单尾式和双尾式,它们利用流固耦合(FSI)产生推力。这两种设备的设计灵感来自鳗鱼式游泳,由高功密度(HWD)驱动器驱动软尾,该驱动器由形状记忆合金(SMA)线供电。虽然这些推进器已被证明适用于微型机器人水下运动,并且可以通过简单的架构在二维(2D)空间中进行轨迹跟踪控制,但相关力的特性和大小尚未得到系统研究。在本文的研究中,我们采用了一种基于反作用力的理论框架,并使用定制的微牛级分辨率力传感器获得了用于表征的实验数据。对于测试的单尾推进器,我们测得的最大和周期平均力值分别为0.45 mN和2.97微牛,多次测试的平均值。对于双尾推进器,我们测得的最大和周期平均力值分别为0.61 mN和22.6微牛。这些结果代表了对此类昆虫尺度推进器产生的瞬时推力的首次测量,并为高效微型机器人推进的FSI提供了见解。
🔬 方法详解
问题定义:现有昆虫尺度水下机器人的推进系统,虽然在运动控制方面取得了一定进展,但缺乏对其推进力特性的系统性研究。这使得难以深入理解流固耦合机制,进而无法优化推进效率,限制了微型机器人在复杂水下环境中的应用。现有方法主要集中在运动学控制,而忽略了推进力本身的测量和分析。
核心思路:本文的核心思路是通过实验测量来表征昆虫尺度推进器的力特性。具体而言,设计并制造了单尾和双尾两种推进器,其灵感来源于鳗鱼的游泳方式,利用软尾的摆动与水流的相互作用产生推力。通过精确测量推进器产生的推力,可以深入理解流固耦合机制,为优化推进器设计提供依据。
技术框架:整体实验框架包括:1) 推进器的设计与制造,采用形状记忆合金(SMA)驱动软尾摆动;2) 定制微牛级分辨率的力传感器,用于精确测量推进器产生的推力;3) 实验数据采集与分析,包括测量最大推力和周期平均推力,并进行多次重复实验以保证数据的可靠性。该框架旨在系统地表征推进器的力学性能。
关键创新:本文最重要的技术创新在于首次对昆虫尺度水下推进器的瞬时推力进行了测量。以往的研究主要集中在运动学分析或仿真模拟,缺乏实际的力学性能数据。通过定制高灵敏度的力传感器,实现了对微小推力的精确测量,为流固耦合推进器的设计和优化提供了重要的实验依据。
关键设计:推进器的关键设计包括:1) 软尾的材料选择和几何形状设计,需要兼顾柔性和强度,以实现高效的流固耦合;2) SMA驱动器的控制策略,需要精确控制SMA的加热和冷却,以实现软尾的精确摆动;3) 力传感器的标定和校准,需要保证传感器的精度和稳定性,以获得可靠的推力数据。
🖼️ 关键图片


📊 实验亮点
实验结果表明,单尾推进器的最大推力为0.45 mN,周期平均推力为2.97微牛。双尾推进器的最大推力为0.61 mN,周期平均推力为22.6微牛。双尾推进器在周期平均推力方面显著优于单尾推进器,表明双尾设计可能更适合需要持续推进的应用场景。这些数据为后续推进器设计优化提供了重要的参考。
🎯 应用场景
该研究成果可应用于微型水下机器人,例如环境监测、水下勘探、生物医学工程等领域。通过优化推进器的设计,可以提高微型机器人的运动效率和操控性,使其能够在复杂的水下环境中执行各种任务。未来的研究可以进一步探索更复杂的推进机制和控制策略,以实现更高效、更灵活的微型水下机器人。
📄 摘要(原文)
We present force characterizations of two newly developed insect-scale propulsors--one single-tailed and one double-tailed--for microrobotic swimmers that leverage fluid-structure interaction (FSI) to generate thrust. The designs of these two devices were inspired by anguilliform swimming and are driven by soft tails excited by high-work-density (HWD) actuators powered by shape-memory alloy (SMA) wires. While these propulsors have been demonstrated to be suitable for microrobotic aquatic locomotion and controllable with simple architectures for trajectory tracking in the two-dimensional (2D) space, the characteristics and magnitudes of the associated forces have not been studied systematically. In the research presented here, we adopted a theoretical framework based on the notion of reactive forces and obtained experimental data for characterization using a custom-built micro-N-resolution force sensor. We measured maximum and cycle-averaged force values with multi-test means of respectively 0.45 mN and 2.97 micro-N, for the tested single-tail propulsor. For the dual-tail propulsor, we measured maximum and cycle-averaged force values with multi-test means of 0.61 mN and 22.6 micro-N, respectively. These results represent the first measurements of the instantaneous thrust generated by insect-scale propulsors of this type and provide insights into FSI for efficient microrobotic propulsion.