Debate2Create: Robot Co-design via Large Language Model Debates
作者: Kevin Qiu, Marek Cygan
分类: cs.RO, cs.LG, cs.MA
发布日期: 2025-10-29
💡 一句话要点
Debate2Create:利用大语言模型辩论实现机器人协同设计
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人协同设计 大语言模型 多智能体辩论 机器人形态优化 奖励函数设计
📋 核心要点
- 机器人形态和控制的协同设计面临设计空间巨大和身形行为紧密耦合的挑战。
- D2C框架利用大语言模型智能体进行辩论,迭代优化机器人形态和奖励函数。
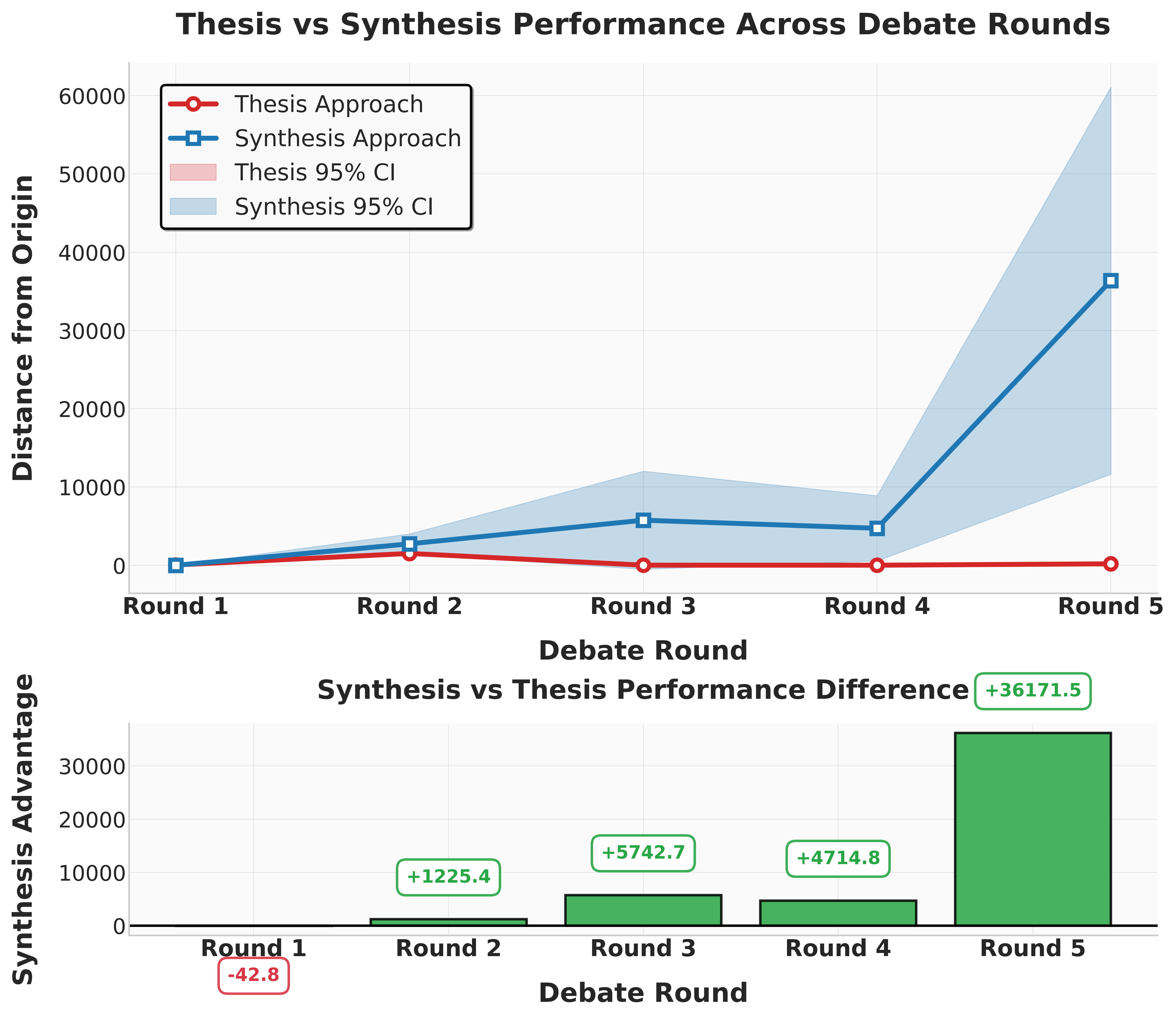
- 实验表明,D2C在四足运动任务中,机器人性能比默认设计提升73%。
📝 摘要(中文)
本文提出了一种名为Debate2Create (D2C) 的框架,该框架利用大语言模型 (LLM) 智能体进行结构化的辩论,从而共同优化机器人的形态和奖励函数。在每一轮辩论中,设计智能体提出有针对性的形态修改建议,而控制智能体则设计定制化的奖励函数以利用新的设计。随后,一个由多个评判者组成的小组在仿真环境中评估设计-控制对,并提供反馈以指导下一轮辩论。通过迭代辩论,智能体逐步改进其提案,从而产生越来越有效的机器人设计。值得注意的是,D2C在没有明确多样性目标的情况下,产生了多样化和专业化的形态。在四足运动基准测试中,D2C发现的设计比默认设计行进距离远73%,这表明基于LLM的结构化辩论可以作为一种强大的新兴机器人协同设计机制。我们的结果表明,多智能体辩论与基于物理的反馈相结合,是自动化机器人设计的一个有前景的新范例。
🔬 方法详解
问题定义:机器人形态和控制器的协同设计是一个复杂的问题,传统的优化方法难以处理巨大的设计空间以及形态和控制之间的强耦合关系。现有的方法通常需要人工设计特征或依赖于大量的计算资源进行搜索,效率较低,且难以发现新颖的设计。
核心思路:本文的核心思路是利用大语言模型(LLM)的推理和生成能力,模拟人类设计师之间的辩论过程,通过迭代优化机器人的形态和控制策略。设计智能体提出形态修改建议,控制智能体设计奖励函数,评判者评估并提供反馈,从而逐步改进设计。
技术框架:D2C框架包含三个主要模块:设计智能体、控制智能体和评判者。设计智能体负责提出机器人形态的修改建议;控制智能体负责设计奖励函数,以最大化利用当前形态的性能;评判者在仿真环境中评估设计-控制对,并提供反馈,指导下一轮辩论。整个流程通过多轮迭代,逐步优化机器人设计。
关键创新:D2C的关键创新在于利用LLM进行机器人协同设计,将设计过程转化为一个结构化的辩论过程。与传统的优化方法相比,D2C能够更有效地探索设计空间,发现新颖的机器人形态和控制策略。此外,D2C无需人工设计特征,降低了人工干预的程度。
关键设计:设计智能体和控制智能体都基于LLM实现,通过prompt工程来指导其行为。评判者使用物理仿真引擎来评估设计-控制对的性能,并提供定量反馈。辩论的轮数和每次修改的幅度是重要的超参数,需要根据具体任务进行调整。奖励函数的设计需要考虑任务目标和机器人形态的特点。
🖼️ 关键图片
📊 实验亮点
在四足运动基准测试中,D2C发现的机器人设计比默认设计行进距离远73%。该结果表明,基于LLM的结构化辩论可以作为一种强大的机器人协同设计机制。此外,D2C在没有明确多样性目标的情况下,产生了多样化和专业化的机器人形态,体现了该方法的潜力。
🎯 应用场景
该研究成果可应用于各种机器人设计场景,例如四足机器人、人形机器人、水下机器人等。通过自动化协同设计,可以快速生成满足特定任务需求的机器人,降低设计成本,提高设计效率。此外,该方法还可以用于探索新的机器人形态和控制策略,推动机器人技术的创新。
📄 摘要(原文)
Automating the co-design of a robot's morphology and control is a long-standing challenge due to the vast design space and the tight coupling between body and behavior. We introduce Debate2Create (D2C), a framework in which large language model (LLM) agents engage in a structured dialectical debate to jointly optimize a robot's design and its reward function. In each round, a design agent proposes targeted morphological modifications, and a control agent devises a reward function tailored to exploit the new design. A panel of pluralistic judges then evaluates the design-control pair in simulation and provides feedback that guides the next round of debate. Through iterative debates, the agents progressively refine their proposals, producing increasingly effective robot designs. Notably, D2C yields diverse and specialized morphologies despite no explicit diversity objective. On a quadruped locomotion benchmark, D2C discovers designs that travel 73% farther than the default, demonstrating that structured LLM-based debate can serve as a powerful mechanism for emergent robot co-design. Our results suggest that multi-agent debate, when coupled with physics-grounded feedback, is a promising new paradigm for automated robot design.