Development of Implicit-Explicit Control Based Amphibious Centipede-Type Robot and Evaluation of its Mobile Performance
作者: Yusuke Tsunoda, Seiya Yamamoto, Kazuki Ito, Runze Xiao, Keisuke Naniwa, Koichi Osuka
分类: cs.RO
发布日期: 2025-10-29
💡 一句话要点
提出基于隐式-显式控制的蜈蚣型两栖机器人,优化腿部结构以提升陆地和水域移动性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 两栖机器人 多足机器人 隐式-显式控制 步态控制 腿部结构优化
📋 核心要点
- 传统多足机器人需要针对不同环境设计步态和切换控制器,这在复杂环境下难以实现。
- 本研究提出一种基于隐式-显式控制的蜈蚣型机器人,通过优化腿部结构实现水陆通用移动。
- 实验结果表明,特定腿部结构能够在统一控制下,有效降低滑移率和能耗,实现水陆两栖移动。
📝 摘要(中文)
本研究旨在开发一种蜈蚣型两栖机器人,该机器人能够在陆地和水域环境中移动,并采用简单统一的控制方案。现有技术通常依赖于环境切换时切换控制器,但为复杂多样的环境设计合适的步态以及准确判断控制器切换时机具有挑战性。本研究基于隐式-显式控制理念,巧妙设计机器人本体结构,实现了在水陆环境中的通用导航。该机器人具有柔性关节,每个身体节段上都有左右腿,重点关注与环境广泛接触的腿部结构。论文评估了三种腿部结构在陆地和水域中的运动性能,使用腿部滑移率和执行器能耗作为评估指标。实验结果表明,存在一种合适的腿部结构,能够在相同的控制下导航水陆环境。
🔬 方法详解
问题定义:现有两栖机器人在陆地和水域之间切换时,通常需要切换控制策略以适应不同的环境。然而,为每种环境设计合适的步态,并准确判断何时进行控制器切换,是一个具有挑战性的问题,尤其是在复杂和多变的环境中。这种方法增加了控制系统的复杂性,并且可能导致切换过程中的不稳定性和效率降低。
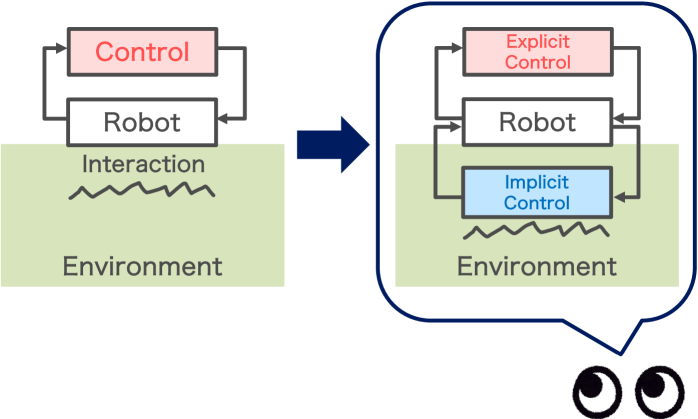
核心思路:本研究的核心思路是设计一种具有通用运动能力的蜈蚣型机器人,使其能够在陆地和水域环境中采用相同的控制策略。通过优化机器人的腿部结构和采用隐式-显式控制方法,实现对不同环境的自适应性,从而避免了复杂的控制器切换过程。这种设计简化了控制系统,并提高了机器人在不同环境中的运动效率和稳定性。
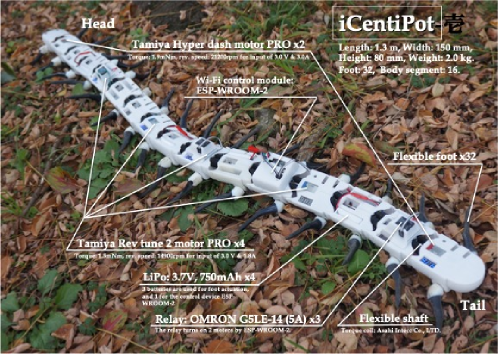
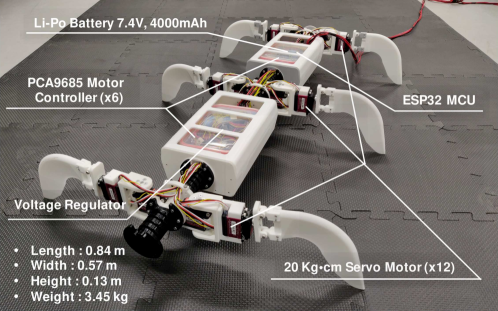
技术框架:该研究的整体框架包括以下几个主要部分:1) 机器人本体设计:设计具有柔性关节和多足结构的蜈蚣型机器人,重点关注腿部结构的设计。2) 隐式-显式控制:采用隐式控制来处理机器人的整体运动,显式控制用于调整腿部的运动,实现对环境的自适应。3) 实验评估:在陆地和水域环境中测试不同腿部结构的运动性能,使用腿部滑移率和执行器能耗作为评估指标。
关键创新:该研究的关键创新在于将隐式-显式控制方法应用于两栖机器人,并结合对腿部结构的优化设计,实现了在水陆环境中采用统一控制策略的通用运动能力。与传统的需要切换控制器的两栖机器人相比,该方法简化了控制系统,提高了机器人的适应性和效率。
关键设计:腿部结构是关键设计之一,研究中测试了三种不同的腿部结构,并评估了它们在陆地和水域环境中的运动性能。评估指标包括腿部滑移率和执行器能耗。通过实验数据分析,确定了最适合水陆两栖运动的腿部结构。隐式-显式控制的具体实现细节(例如,控制器的参数设置)在论文中可能没有详细描述,属于需要进一步研究的内容。
🖼️ 关键图片
📊 实验亮点
实验结果表明,通过优化腿部结构,蜈蚣型两栖机器人能够在陆地和水域环境中实现有效的移动。具体而言,特定腿部结构在统一控制下,能够显著降低腿部滑移率和执行器能耗,从而提高机器人的运动效率和稳定性。虽然论文中没有给出具体的性能提升数据,但实验结果证实了该方法的可行性和有效性。
🎯 应用场景
该研究成果可应用于水陆两栖环境下的侦察、搜救、环境监测等领域。例如,在灾害救援中,机器人可以自主穿越陆地和水域,搜索幸存者并提供援助。在环境监测中,机器人可以用于水质监测、水下地形勘测等任务。此外,该技术还可应用于水下管道检测、海洋资源勘探等领域,具有广阔的应用前景。
📄 摘要(原文)
Multi-legged mobile robots possess high mobility performance in rough terrain environments, stemming from their high postural stability, joint flexibility, and the redundancy provided by multiple legs. In prior research on navigating between different environments such as land and water, the primary strategy employed involves switching to a controller that generates an appropriate gait for the new environment upon entering it. However, designing appropriate gaits for each complex and diverse environment and accurately determining controller switching for each environment is challenging. Therefore, this research develops a centipede-type mobile robot that navigates both aquatic and terrestrial environments with a simple, unified control scheme, based on the implicit-explicit control philosophy and by ingeniously designing the robot's body structure. In this research, we developed the robot featuring flexible joints and left and right legs on each body segment and focused on the leg structure which has extensive contact with the environment. This paper evaluates the locomotion performance on land and water using the three developed leg structures, using the robot's leg slip rate and actuator energy consumption as evaluation metrics. The experimental results confirmed the existence of an appropriate leg structure capable of navigating both aquatic and terrestrial environments under identical control.