Embodying Physical Computing into Soft Robots
作者: Jun Wang, Ziyang Zhou, Ardalan Kahak, Suyi Li
分类: cs.RO
发布日期: 2025-10-28
💡 一句话要点
提出将物理计算融入软体机器人的框架,实现自主智能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 物理计算 自主控制 模拟振荡器 储层计算
📋 核心要点
- 现有软体机器人依赖外部电子元件,限制了其自主性和适应性,面临着如何在软体机器人内部实现计算的挑战。
- 本文提出将物理计算融入软体机器人,利用机械结构的相互作用进行计算,无需传统电子元件,实现自主控制。
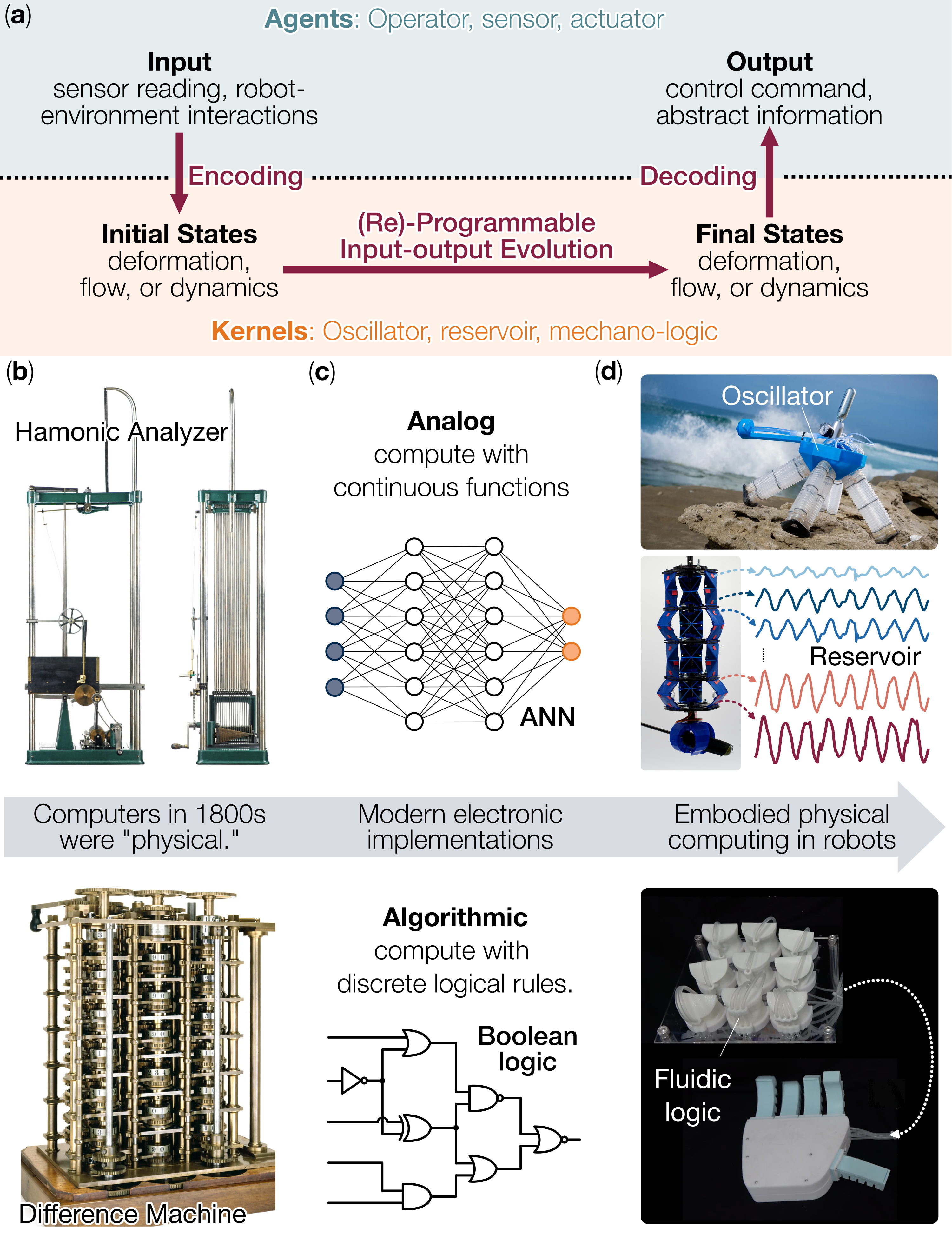
- 论文探讨了三种物理计算策略,包括模拟振荡器、物理储层计算和物理算法计算,并展示了其在软体机器人中的应用。
📝 摘要(中文)
本文提出了一种将物理计算融入软体机器人的框架,旨在提升软体机器人在日常应用中的鲁棒性和智能性。物理计算通过将输入编码到机械计算内核中,并利用内核内部元件的相互作用来计算输出,且这种输入到输出的演化过程可重新编程。本文探讨了三种独特的策略:模拟振荡器、物理储层计算和物理算法计算。这些嵌入式计算方法使软体机器人能够执行复杂的行为,否则将需要基于CMOS的电子设备才能实现,包括协调运动与避障、有效载荷重量和方向分类以及基于逻辑规则的可编程操作。本文详细介绍了这些嵌入式物理计算方法的工作原理,综述了当前的技术水平,并展望了未来的发展。
🔬 方法详解
问题定义:软体机器人通常依赖于外部的电子控制器和计算单元,这限制了它们的自主性和适应性。现有的基于CMOS的电子设备在软体机器人中的集成面临着柔性、能量效率和环境适应性等方面的挑战。因此,如何将计算能力有效地嵌入到软体机器人本身,使其能够自主地感知环境并做出反应,是一个亟待解决的问题。
核心思路:本文的核心思路是将物理计算的概念引入软体机器人。物理计算利用物理系统的固有动力学特性来进行计算,而不是依赖于传统的数字电路。通过巧妙地设计软体机器人的结构和材料,可以使其内部的机械相互作用充当计算内核,从而实现对输入的处理和对输出的控制。这种方法避免了对外部电子设备的依赖,提高了软体机器人的自主性和鲁棒性。
技术框架:本文提出的框架主要包括以下几个关键组成部分:1) 输入编码:将外部环境的输入(例如,压力、光照等)转换为软体机器人内部的机械信号。2) 物理计算内核:利用软体机器人的结构和材料特性,构建一个能够进行计算的物理系统。这个内核可以是模拟振荡器、物理储层或者物理算法计算单元。3) 输出解码:将物理计算内核的输出转换为软体机器人的动作或行为。整个框架的目标是实现从输入到输出的自主映射,而无需外部的电子控制。
关键创新:本文最重要的技术创新点在于将物理计算的概念与软体机器人相结合。与传统的基于电子控制的软体机器人相比,这种方法具有以下优势:1) 自主性:软体机器人可以自主地感知环境并做出反应,无需外部干预。2) 鲁棒性:物理计算内核对环境噪声和干扰具有一定的容忍度。3) 能量效率:物理计算通常比电子计算更节能。
关键设计:论文讨论了三种具体的物理计算策略:1) 模拟振荡器:利用软体机器人的振荡运动来实现周期性的行为,例如行走或游泳。2) 物理储层计算:将软体机器人的复杂动力学系统作为储层,通过训练输入权重来实现对输入的分类或预测。3) 物理算法计算:设计特定的机械结构来实现特定的算法,例如逻辑运算或控制算法。
🖼️ 关键图片


📊 实验亮点
论文综述了三种物理计算策略在软体机器人中的应用,展示了其在实现复杂行为方面的潜力。例如,利用模拟振荡器实现了软体机器人的协调运动和避障;利用物理储层计算实现了有效载荷的重量和方向分类;利用物理算法计算实现了基于逻辑规则的可编程操作。这些实验结果表明,物理计算可以有效地嵌入到软体机器人中,并使其具备自主智能。
🎯 应用场景
该研究成果可应用于多个领域,包括:1) 医疗康复:开发能够自主适应患者需求的个性化康复机器人。2) 环境监测:构建能够在复杂环境中自主导航和收集数据的监测机器人。3) 搜救行动:设计能够在废墟等危险环境中进行搜索和救援的机器人。未来的影响在于推动软体机器人向更智能、更自主的方向发展。
📄 摘要(原文)
Softening and onboarding computers and controllers is one of the final frontiers in soft robotics towards their robustness and intelligence for everyday use. In this regard, embodying soft and physical computing presents exciting potential. Physical computing seeks to encode inputs into a mechanical computing kernel and leverage the internal interactions among this kernel's constituent elements to compute the output. Moreover, such input-to-output evolution can be re-programmable. This perspective paper proposes a framework for embodying physical computing into soft robots and discusses three unique strategies in the literature: analog oscillators, physical reservoir computing, and physical algorithmic computing. These embodied computers enable the soft robot to perform complex behaviors that would otherwise require CMOS-based electronics -- including coordinated locomotion with obstacle avoidance, payload weight and orientation classification, and programmable operation based on logical rules. This paper will detail the working principles of these embodied physical computing methods, survey the current state-of-the-art, and present a perspective for future development.