Feature Matching-Based Gait Phase Prediction for Obstacle Crossing Control of Powered Transfemoral Prosthesis
作者: Jiaxuan Zhang, Yuquan Leng, Yixuan Guo, Chenglong Fu
分类: cs.RO, eess.SY
发布日期: 2025-10-28
备注: 6 pages, conference
💡 一句话要点
提出基于特征匹配的步态相位预测方法,用于动力式股骨假肢的障碍跨越控制
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: 动力式假肢 步态相位预测 特征匹配 遗传算法 神经网络 惯性传感器 障碍跨越
📋 核心要点
- 动力式股骨假肢在复杂地形下的障碍跨越能力不足,需要更精确的步态相位预测和关节角度控制。
- 利用健侧踝关节的惯性传感器数据,结合遗传算法优化的神经网络,预测假肢所需的大腿和膝关节角度。
- 实验表明,该方法在噪声环境下仍能准确预测步态相位和关节角度,为假肢的障碍跨越提供有效支持。
📝 摘要(中文)
本研究针对动力式股骨假肢佩戴者在跨越障碍物或复杂地形时面临的挑战,提出了一种利用健侧踝关节惯性传感器引导跨越动作的方法。该方法使用遗传算法优化神经网络结构,以预测所需的大腿和膝关节角度。步态进程预测算法确定假肢膝关节电机的驱动角度索引,从而定义必要的大腿和膝关节角度以及步态进程。结果表明,当添加到大腿角度数据中的高斯噪声标准差小于1时,该方法能够有效消除噪声干扰,在150 Hz下实现100%的步态相位估计准确率,大腿角度预测误差为8.71%,膝关节角度预测误差为6.78%。这些发现证明了该方法能够准确预测步态进程和关节角度,为动力式股骨假肢的障碍跨越提供了重要的实际价值。
🔬 方法详解
问题定义:动力式股骨假肢佩戴者在面对障碍物时,难以准确控制假肢的运动,导致跨越障碍物困难。现有的方法可能依赖于预定义的步态模式或简单的反馈控制,无法适应复杂地形和不同高度的障碍物,缺乏对步态进程的精确预测和对关节角度的精确控制。
核心思路:利用健侧踝关节的惯性传感器数据来预测患侧假肢的运动状态。健侧的运动模式可以为患侧提供有效的参考信息,从而实现更自然、更稳定的步态。通过预测大腿和膝关节的角度,并结合步态进程预测算法,可以实现对假肢运动的精确控制。
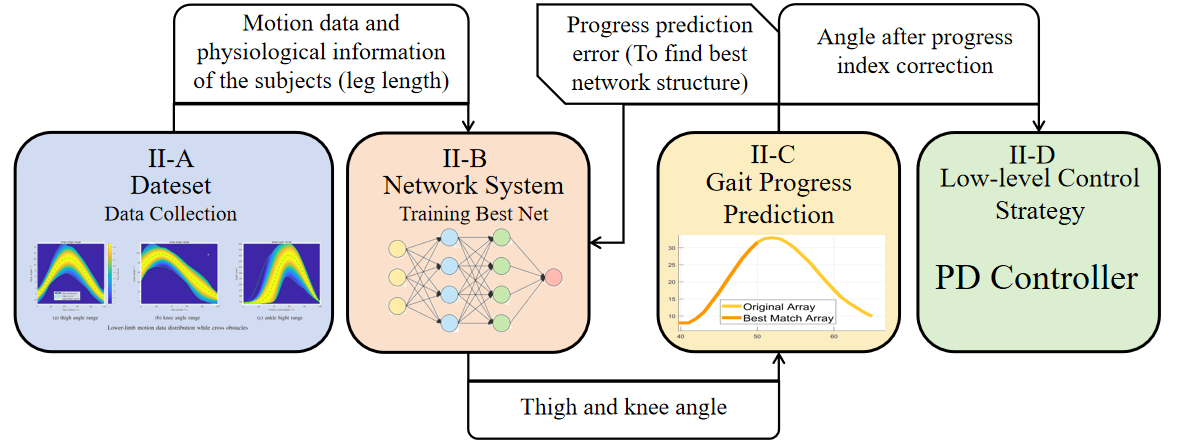
技术框架:该方法主要包含以下几个模块:1) 健侧踝关节惯性传感器数据采集;2) 遗传算法优化的神经网络,用于预测大腿和膝关节角度;3) 步态进程预测算法,确定膝关节电机驱动角度索引;4) 假肢控制系统,根据预测的角度和步态进程控制假肢运动。整体流程是从健侧获取运动信息,经过神经网络预测和步态进程预测,最终控制假肢的运动。
关键创新:该方法的关键创新在于结合了健侧踝关节的惯性传感器数据和遗传算法优化的神经网络,实现了对步态相位和关节角度的精确预测。与传统的基于预定义模式或简单反馈控制的方法相比,该方法能够更好地适应复杂地形和不同高度的障碍物,提供更自然、更稳定的步态。
关键设计:遗传算法用于优化神经网络的结构,包括层数、神经元数量等。神经网络的输入是健侧踝关节的惯性传感器数据,输出是大腿和膝关节的角度。步态进程预测算法根据预测的角度和步态周期,确定膝关节电机驱动角度索引。具体参数设置和损失函数等细节在论文中可能未详细描述,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在150Hz采样频率下,步态相位估计准确率达到100%,大腿角度预测误差为8.71%,膝关节角度预测误差为6.78%。即使在添加高斯噪声的情况下,只要噪声标准差小于1,该方法仍能有效消除噪声干扰,保持较高的预测准确率。这些结果表明该方法具有良好的鲁棒性和实用性。
🎯 应用场景
该研究成果可应用于动力式股骨假肢的控制系统,提高假肢在复杂环境下的适应性和运动能力,帮助截肢患者更好地完成日常生活和工作。此外,该方法也可扩展到其他类型的假肢或外骨骼机器人,为下肢功能障碍患者提供更智能、更舒适的辅助设备。未来,结合视觉传感器和环境感知技术,有望实现更自主、更安全的假肢控制。
📄 摘要(原文)
For amputees with powered transfemoral prosthetics, navigating obstacles or complex terrain remains challenging. This study addresses this issue by using an inertial sensor on the sound ankle to guide obstacle-crossing movements. A genetic algorithm computes the optimal neural network structure to predict the required angles of the thigh and knee joints. A gait progression prediction algorithm determines the actuation angle index for the prosthetic knee motor, ultimately defining the necessary thigh and knee angles and gait progression. Results show that when the standard deviation of Gaussian noise added to the thigh angle data is less than 1, the method can effectively eliminate noise interference, achieving 100\% accuracy in gait phase estimation under 150 Hz, with thigh angle prediction error being 8.71\% and knee angle prediction error being 6.78\%. These findings demonstrate the method's ability to accurately predict gait progression and joint angles, offering significant practical value for obstacle negotiation in powered transfemoral prosthetics.