Dynamically-Consistent Trajectory Optimization for Legged Robots via Contact Point Decomposition
作者: Sangmin Kim, Hajun Kim, Gijeong Kim, Min-Gyu Kim, Hae-Won Park
分类: cs.RO
发布日期: 2025-10-28
备注: 8 pages, 4 figures, IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED OCTOBER, 2025
💡 一句话要点
提出基于接触点分解的动态一致性轨迹优化方法,用于生成腿式机器人可靠运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 腿式机器人 轨迹优化 接触点分解 动力学一致性 Bézier多项式
📋 核心要点
- 腿式机器人轨迹优化需同时计算机器人路径、接触序列并精确考虑动力学,现有方法难以兼顾。
- 利用线性微分方程的叠加性解耦接触点动力学,并结合Bézier多项式保证动力学一致性和摩擦锥约束。
- 实验验证了该框架在四足机器人模型上生成动态可行运动的能力,可生成多种步态序列。
📝 摘要(中文)
本文提出了一种基于相位的轨迹优化方法,旨在为腿式机器人生成可靠的运动轨迹。该方法能够确保整个轨迹中平移动力学可行性和摩擦锥约束的满足。具体而言,该方法利用线性微分方程的叠加性质,将每个接触点的平移动力学解耦,这些接触点在不同的相位序列下工作。此外,利用Bézier多项式的微分矩阵,推导出机器人位置和力之间的解析关系,从而保证平移动力学的一致性满足。通过利用Bézier多项式的凸包性质,该方法还确保了摩擦锥约束的满足。所提出的轨迹优化框架能够为腿式机器人生成具有各种步态序列的动态可靠运动。通过四足机器人模型的实验验证了该框架在动力学可行性和运动生成方面的有效性。
🔬 方法详解
问题定义:腿式机器人轨迹优化问题需要同时确定机器人的运动轨迹和接触序列,并且需要精确地考虑动力学约束。现有的方法通常难以同时满足这些要求,或者计算复杂度过高,难以应用于实际的机器人控制系统中。特别是在保证动力学可行性(例如满足摩擦锥约束)方面,现有方法往往采用近似或者简化模型,导致生成的轨迹在实际执行时可能失败。
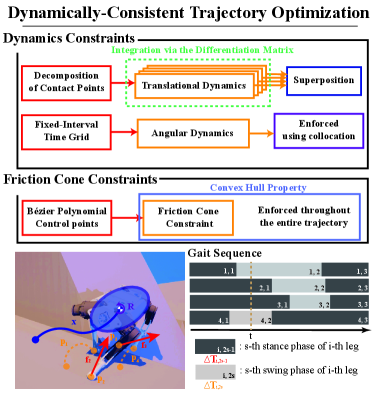
核心思路:本文的核心思路是利用线性微分方程的叠加性质,将机器人平移动力学分解为多个独立的接触点动力学。这样,每个接触点的动力学可以单独进行优化,从而降低了问题的复杂度。此外,利用Bézier多项式的性质,可以方便地表示机器人的位置和力,并且可以保证动力学约束的满足。
技术框架:该方法的技术框架主要包括以下几个步骤:1) 定义机器人的运动轨迹和接触序列;2) 利用线性微分方程的叠加性质,将平移动力学分解为多个独立的接触点动力学;3) 利用Bézier多项式表示机器人的位置和力;4) 构建优化问题,目标是最小化机器人的运动成本,约束包括动力学约束、摩擦锥约束等;5) 求解优化问题,得到机器人的运动轨迹和接触力。
关键创新:该方法最重要的技术创新点在于利用了线性微分方程的叠加性质,将平移动力学分解为多个独立的接触点动力学。这种分解方式可以显著降低问题的复杂度,并且可以方便地利用Bézier多项式来表示机器人的位置和力。此外,该方法还利用了Bézier多项式的凸包性质,可以保证摩擦锥约束的满足。
关键设计:该方法的一个关键设计是使用Bézier多项式来表示机器人的位置和力。Bézier多项式具有良好的性质,例如可以方便地计算其导数,并且其凸包性质可以保证摩擦锥约束的满足。此外,该方法还设计了一个合适的优化目标函数,用于最小化机器人的运动成本。优化目标函数通常包括机器人的关节力矩、关节速度等。
🖼️ 关键图片

📊 实验亮点
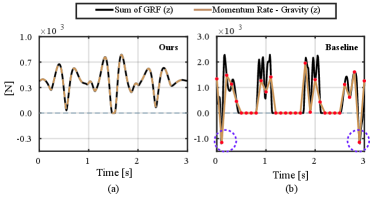
实验结果表明,该方法能够为四足机器人生成动态可行的运动轨迹,并且可以生成多种步态序列,例如小跑、跳跃等。通过仿真实验验证了该方法在动力学可行性和运动生成方面的有效性。虽然论文中没有给出具体的性能数据和对比基线,但实验结果表明该方法具有良好的应用前景。
🎯 应用场景
该研究成果可应用于各种腿式机器人,例如四足机器人、双足机器人等。可以帮助这些机器人在复杂环境中实现稳定、高效的运动,例如在崎岖地形上行走、跳跃、攀爬等。该方法在搜索救援、物流运输、工业巡检等领域具有潜在的应用价值,能够提升机器人的自主性和适应性。
📄 摘要(原文)
To generate reliable motion for legged robots through trajectory optimization, it is crucial to simultaneously compute the robot's path and contact sequence, as well as accurately consider the dynamics in the problem formulation. In this paper, we present a phase-based trajectory optimization that ensures the feasibility of translational dynamics and friction cone constraints throughout the entire trajectory. Specifically, our approach leverages the superposition properties of linear differential equations to decouple the translational dynamics for each contact point, which operates under different phase sequences. Furthermore, we utilize the differentiation matrix of B{é}zier polynomials to derive an analytical relationship between the robot's position and force, thereby ensuring the consistent satisfaction of translational dynamics. Additionally, by exploiting the convex closure property of B{é}zier polynomials, our method ensures compliance with friction cone constraints. Using the aforementioned approach, the proposed trajectory optimization framework can generate dynamically reliable motions with various gait sequences for legged robots. We validate our framework using a quadruped robot model, focusing on the feasibility of dynamics and motion generation.