STRIDER: Navigation via Instruction-Aligned Structural Decision Space Optimization
作者: Diqi He, Xuehao Gao, Hao Li, Junwei Han, Dingwen Zhang
分类: cs.RO, cs.AI
发布日期: 2025-10-27
💡 一句话要点
STRIDER:通过指令对齐的结构化决策空间优化实现导航
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 视觉语言导航 零样本学习 连续环境 结构化决策 任务对齐
📋 核心要点
- 现有VLN-CE方法缺乏结构化决策,未能充分整合历史动作反馈,导致导航鲁棒性不足。
- STRIDER框架通过空间结构约束动作空间,并根据任务进度动态调整行为,实现指令对齐的决策优化。
- 实验表明,STRIDER在R2R-CE和RxR-CE基准上显著提升了导航成功率,验证了其有效性。
📝 摘要(中文)
本文提出了一种用于连续环境中零样本视觉语言导航(VLN-CE)任务的新框架STRIDER(指令对齐的结构化决策空间优化)。该任务要求智能体在未见过的3D环境中,仅使用自然语言指令进行导航,无需任何特定场景的训练。该任务的关键挑战在于确保智能体的行为在长时程执行中与空间结构和任务意图对齐。现有方法由于缺乏结构化的决策和对先前行为反馈的充分整合,通常无法实现鲁棒的导航。STRIDER通过整合空间布局先验和动态任务反馈,系统地优化智能体的决策空间来解决这些挑战。该方法引入了两项关键创新:1)通过空间结构约束动作空间的结构化航点生成器;2)基于任务进度调整行为的任务对齐调节器,确保整个导航过程中的语义对齐。在R2R-CE和RxR-CE基准上的大量实验表明,STRIDER显著优于当前最优方法,尤其是在成功率(SR)方面,从29%提高到35%,相对提升了20.7%。这些结果突出了空间约束决策和反馈引导执行在提高零样本VLN-CE导航保真度方面的重要性。
🔬 方法详解
问题定义:论文旨在解决零样本视觉语言导航在连续环境中的挑战,即智能体需要在未见过的3D环境中,根据自然语言指令进行导航。现有方法的痛点在于缺乏结构化的决策空间,以及对历史动作反馈的有效利用,导致导航过程中的语义对齐和鲁棒性不足。
核心思路:论文的核心思路是通过构建一个结构化的决策空间,并利用任务反馈动态优化该空间,从而实现指令与智能体行为的对齐。具体而言,通过空间布局先验约束动作空间,并根据任务进度调整行为,确保智能体在导航过程中始终朝着正确的方向前进。
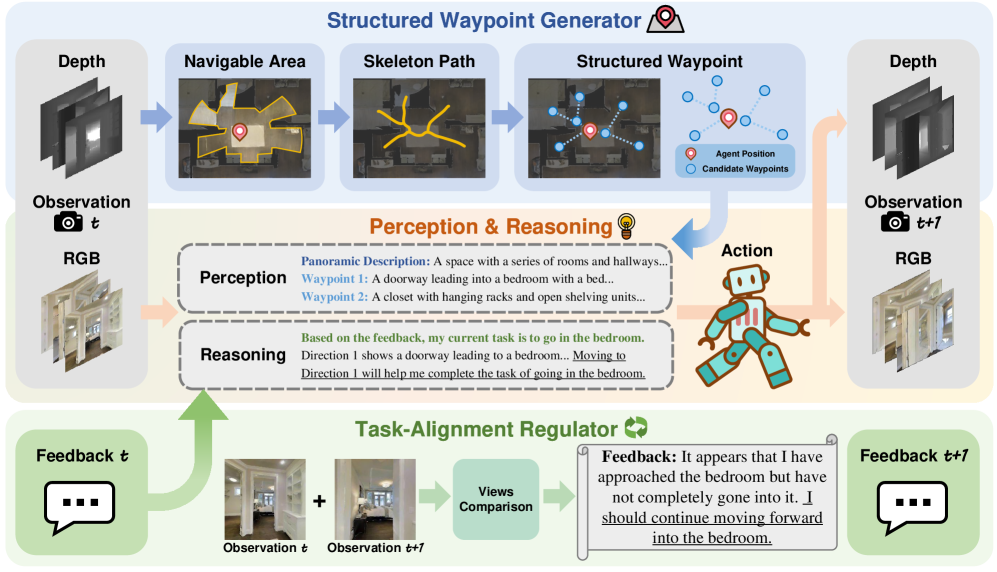
技术框架:STRIDER框架包含两个主要模块:结构化航点生成器和任务对齐调节器。结构化航点生成器负责根据空间结构生成候选航点,约束智能体的动作空间。任务对齐调节器则根据任务进度,对智能体的行为进行调整,确保语义对齐。整个流程是,首先利用结构化航点生成器生成候选动作,然后利用任务对齐调节器对这些动作进行评估和选择,最终执行选定的动作。
关键创新:论文的关键创新在于提出了结构化航点生成器和任务对齐调节器。结构化航点生成器通过空间结构约束动作空间,避免了智能体在无效区域进行探索。任务对齐调节器则通过任务反馈动态调整行为,确保智能体始终朝着正确的方向前进。与现有方法相比,STRIDER更加注重决策空间的结构化和任务反馈的利用。
关键设计:关于结构化航点生成器,具体实现细节未知,可能涉及到对环境地图的分析和处理,以提取有效的航点信息。任务对齐调节器可能使用强化学习或模仿学习等方法,根据任务进度和历史动作反馈,学习一个策略来选择最佳动作。损失函数的设计可能包括对齐损失和导航损失,以确保智能体的行为与指令和环境相符。具体的网络结构未知,但可能包含视觉编码器、语言编码器和决策网络等模块。
🖼️ 关键图片


📊 实验亮点
STRIDER在R2R-CE和RxR-CE基准上取得了显著的性能提升。尤其是在成功率(SR)方面,STRIDER将R2R-CE上的SR从29%提高到35%,相对提升了20.7%。这些结果表明,STRIDER在零样本视觉语言导航任务中具有显著的优势,验证了空间约束决策和反馈引导执行的有效性。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、虚拟现实等领域。例如,可以利用该技术开发智能导航机器人,使其能够在复杂的室内环境中根据用户的语音指令进行导航。此外,该技术还可以应用于自动驾驶领域,提高自动驾驶系统在复杂交通环境中的导航能力。未来,该研究有望推动人机交互和智能机器人技术的发展。
📄 摘要(原文)
The Zero-shot Vision-and-Language Navigation in Continuous Environments (VLN-CE) task requires agents to navigate previously unseen 3D environments using natural language instructions, without any scene-specific training. A critical challenge in this setting lies in ensuring agents' actions align with both spatial structure and task intent over long-horizon execution. Existing methods often fail to achieve robust navigation due to a lack of structured decision-making and insufficient integration of feedback from previous actions. To address these challenges, we propose STRIDER (Instruction-Aligned Structural Decision Space Optimization), a novel framework that systematically optimizes the agent's decision space by integrating spatial layout priors and dynamic task feedback. Our approach introduces two key innovations: 1) a Structured Waypoint Generator that constrains the action space through spatial structure, and 2) a Task-Alignment Regulator that adjusts behavior based on task progress, ensuring semantic alignment throughout navigation. Extensive experiments on the R2R-CE and RxR-CE benchmarks demonstrate that STRIDER significantly outperforms strong SOTA across key metrics; in particular, it improves Success Rate (SR) from 29% to 35%, a relative gain of 20.7%. Such results highlight the importance of spatially constrained decision-making and feedback-guided execution in improving navigation fidelity for zero-shot VLN-CE.