Stand, Walk, Navigate: Recovery-Aware Visual Navigation on a Low-Cost Wheeled Quadruped
作者: Jans Solano, Diego Quiroz
分类: cs.RO
发布日期: 2025-10-27
备注: Accepted at the IROS 2025 Workshop on Wheeled-Legged Robots
💡 一句话要点
面向低成本轮腿式机器人,提出可从跌倒中恢复的视觉导航系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 轮腿式机器人 视觉导航 深度强化学习 跌倒恢复 自主导航
📋 核心要点
- 现有轮腿式机器人系统依赖昂贵的执行器和传感器,且很少集成跌倒恢复功能,尤其是在轮腿式结构中。
- 该研究提出了一种基于视觉的导航系统,结合深度强化学习策略,使低成本轮腿式机器人能够从跌倒中自主恢复,并在复杂地形中稳健移动。
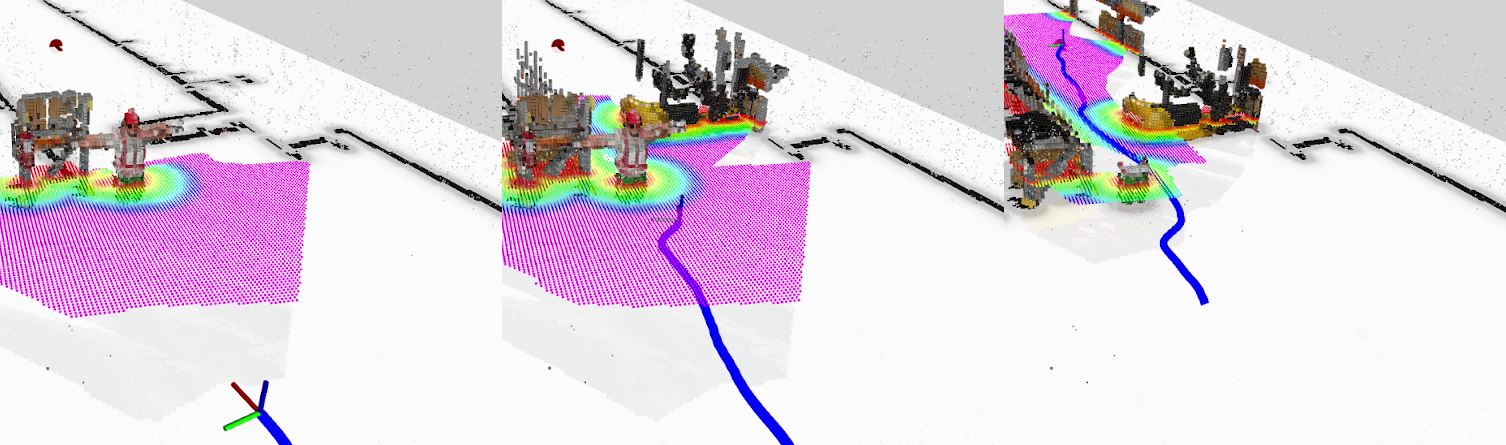
- 仿真实验验证了该系统在不规则地形上的灵活性和从跌倒中恢复的能力,并在室内环境中实现了目标导向导航。
📝 摘要(中文)
本文提出了一种低成本轮腿式机器人上可进行跌倒恢复的视觉惯性导航系统。该系统利用深度相机提供的视觉感知和深度强化学习策略,实现了在各种地形上的稳健运动和从跌倒中自主恢复。仿真实验表明,该系统能够以低扭矩驱动器在不规则地形上灵活移动,并可靠地从外部扰动和自身故障中恢复。此外,还在结构化室内空间中展示了使用低成本感知进行目标导向导航的能力。总而言之,该方法降低了在预算有限的机器人平台上部署自主导航和稳健运动策略的门槛。
🔬 方法详解
问题定义:论文旨在解决低成本轮腿式机器人在复杂环境中自主导航和跌倒恢复的问题。现有方法通常依赖于昂贵的传感器和执行器,并且缺乏有效的跌倒恢复机制,限制了其在实际场景中的应用。
核心思路:论文的核心思路是利用低成本的深度相机进行视觉感知,并结合深度强化学习训练得到的运动策略,使机器人能够在复杂地形上稳健运动,并在跌倒后自主恢复。通过强化学习,机器人可以学习到适应不同地形和扰动的运动策略,从而提高其鲁棒性和自主性。
技术框架:该系统的整体框架包括视觉感知模块、运动控制模块和跌倒恢复模块。视觉感知模块利用深度相机获取环境信息,并进行处理和分析。运动控制模块根据视觉感知结果和强化学习策略,控制机器人的运动。跌倒恢复模块则在机器人跌倒时,利用强化学习策略进行姿态调整,使其能够重新站立。
关键创新:该论文的关键创新在于将深度强化学习应用于低成本轮腿式机器人的跌倒恢复和自主导航。通过强化学习,机器人可以学习到适应不同地形和扰动的运动策略,从而提高其鲁棒性和自主性。此外,该系统还采用了低成本的深度相机,降低了硬件成本。
关键设计:在强化学习方面,论文采用了合适的奖励函数,鼓励机器人在复杂地形上稳健运动,并惩罚跌倒行为。同时,还设计了专门的跌倒恢复策略,使机器人能够在跌倒后快速恢复。在网络结构方面,论文采用了适合机器人控制的神经网络结构,并进行了优化,以提高训练效率和控制精度。
🖼️ 关键图片


📊 实验亮点
仿真实验表明,该系统能够在不规则地形上实现灵活移动,并可靠地从外部扰动和自身故障中恢复。此外,还在结构化室内空间中展示了使用低成本感知进行目标导向导航的能力。这些实验结果验证了该系统在复杂环境中自主导航和跌倒恢复的有效性。
🎯 应用场景
该研究成果可应用于物流、巡检、搜索救援等领域。低成本的轮腿式机器人能够在复杂环境中自主导航和执行任务,例如在仓库中搬运货物、在灾区进行搜索救援等。该研究降低了机器人部署的成本,使其能够更广泛地应用于各种实际场景。
📄 摘要(原文)
Wheeled-legged robots combine the efficiency of wheels with the obstacle negotiation of legs, yet many state-of-the-art systems rely on costly actuators and sensors, and fall-recovery is seldom integrated, especially for wheeled-legged morphologies. This work presents a recovery-aware visual-inertial navigation system on a low-cost wheeled quadruped. The proposed system leverages vision-based perception from a depth camera and deep reinforcement learning policies for robust locomotion and autonomous recovery from falls across diverse terrains. Simulation experiments show agile mobility with low-torque actuators over irregular terrain and reliably recover from external perturbations and self-induced failures. We further show goal directed navigation in structured indoor spaces with low-cost perception. Overall, this approach lowers the barrier to deploying autonomous navigation and robust locomotion policies in budget-constrained robotic platforms.