Full-Dynamics Real-Time Nonlinear Model Predictive Control of Heavy-Duty Hydraulic Manipulator for Trajectory Tracking Tasks
作者: Alvaro Paz, Mahdi Hejrati, Pauli Mustalahti, Jouni Mattila
分类: cs.RO
发布日期: 2025-10-27
备注: This work has been submitted for possible publication in IEEE
💡 一句话要点
提出一种重型液压机械臂全动力学实时非线性模型预测控制方法,用于轨迹跟踪任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非线性模型预测控制 重型液压机械臂 实时控制 轨迹跟踪 多重打靶法 虚拟分解控制 约束优化
📋 核心要点
- 重型液压机械臂的精确控制面临挑战,现有方法难以在满足执行器约束的同时实现高精度轨迹跟踪。
- 该论文提出了一种基于非线性模型预测控制(NMPC)的框架,结合多重打靶策略和实时反馈,保证约束满足。
- 实验结果表明,该方法能在1kHz频率下运行,并在满足关节和末端执行器约束的同时,实现高精度轨迹跟踪。
📝 摘要(中文)
重型液压机械臂(HHMs)由于其庞大的尺寸、高功率和复杂的非线性动力学,在严格的物理和安全约束下运行。确保关节和末端执行器的轨迹符合执行器的能力限制,如力、速度和位置限制,对于安全可靠的运行至关重要,但在实时控制框架中仍未得到充分探索。本文提出了一种非线性模型预测控制(NMPC)框架,旨在保证HHMs完整非线性动力学过程中的约束满足,同时以1 kHz的实时控制频率运行。该方法结合了多重打靶策略和实时传感器反馈,并由基于虚拟分解控制(VDC)的鲁棒低层控制器支持,以实现精确的关节跟踪。在全尺寸液压机械臂上的实验验证表明,NMPC框架不仅在关节层面强制执行执行器约束,而且还确保末端执行器在笛卡尔空间中的运动符合约束。这些结果证明了该方法在严格遵守安全关键限制的同时,提供高精度轨迹跟踪的能力,为大型液压系统的实时控制树立了新的基准。
🔬 方法详解
问题定义:重型液压机械臂由于其非线性动力学特性和严格的物理约束,难以实现高精度和安全的轨迹跟踪。现有方法通常难以同时满足关节层面的执行器约束(如力、速度、位置限制)以及末端执行器的笛卡尔空间约束,导致性能受限或存在安全隐患。
核心思路:该论文的核心思路是利用非线性模型预测控制(NMPC)来显式地考虑机械臂的完整非线性动力学和约束。通过预测未来一段时间内的系统状态,并在优化过程中强制执行约束,从而保证轨迹的安全性和精度。这种方法能够充分利用机械臂的动力学模型,实现更优的控制性能。
技术框架:该控制框架包含以下几个主要模块:1) 机械臂的非线性动力学模型;2) 基于多重打靶法的NMPC求解器,用于优化控制序列;3) 实时传感器反馈,用于更新模型和校正误差;4) 基于虚拟分解控制(VDC)的低层关节控制器,用于实现精确的关节跟踪。整体流程是,NMPC求解器根据当前状态和目标轨迹,计算出最优的关节控制指令,然后由低层控制器执行这些指令,同时传感器反馈用于闭环控制。
关键创新:该论文的关键创新在于将NMPC应用于重型液压机械臂的实时控制,并实现了1 kHz的控制频率。这在很大程度上归功于多重打靶法的应用,它将优化问题分解为多个较小的子问题,从而降低了计算复杂度。此外,结合VDC的低层控制器也提高了关节跟踪的精度和鲁棒性。
关键设计:NMPC求解器使用多重打靶法进行离散化,优化变量包括关节角度、角速度和控制力矩。目标函数通常包含轨迹跟踪误差和控制能量的惩罚项。约束条件包括关节角度、角速度和控制力矩的上下限,以及末端执行器的位置和姿态约束。VDC低层控制器则根据关节角度误差和角速度误差,计算出所需的控制力矩,以实现精确的关节跟踪。
🖼️ 关键图片

📊 实验亮点
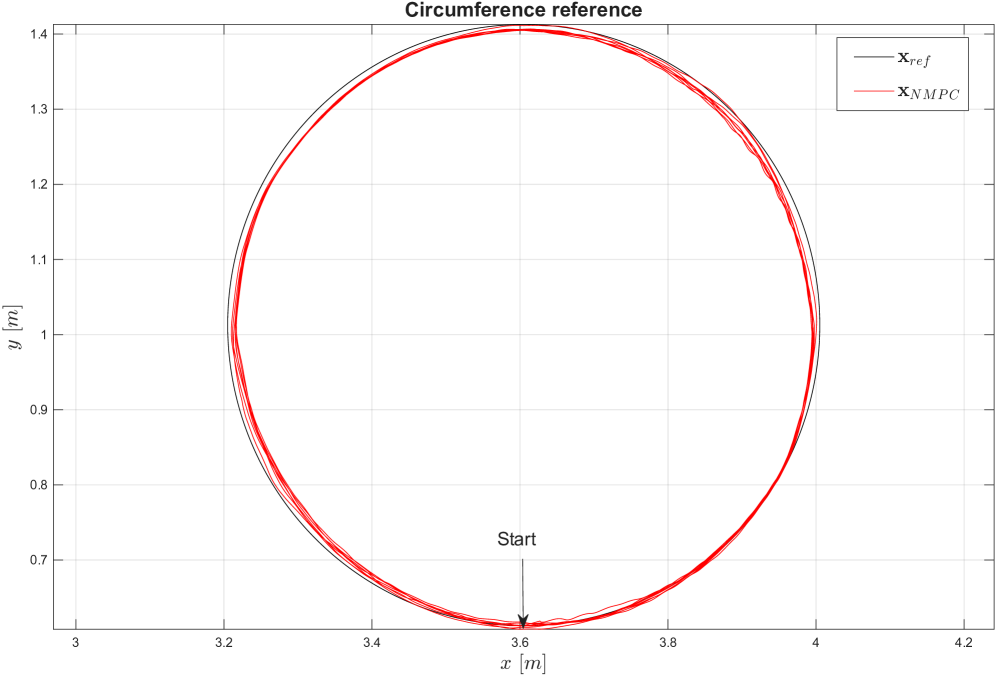
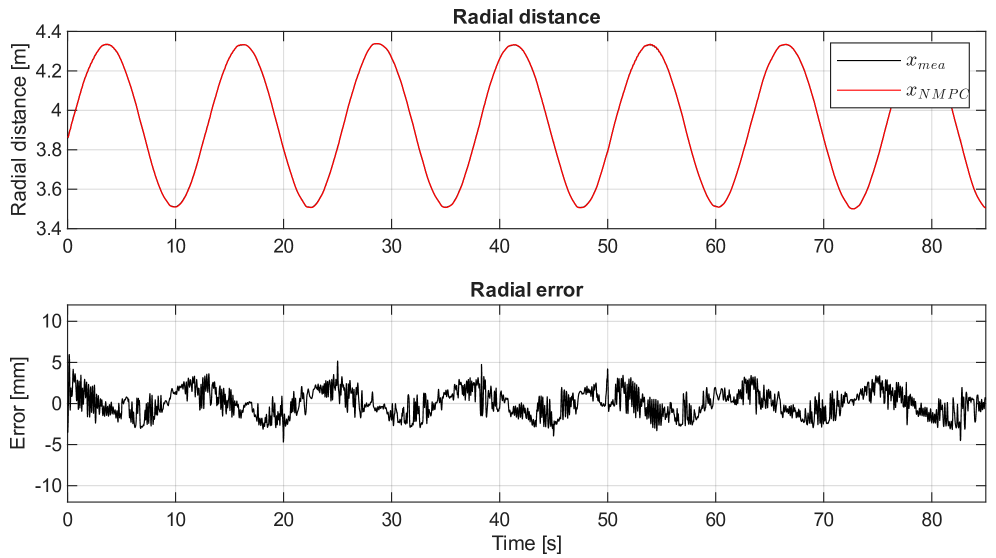
实验结果表明,所提出的NMPC框架能够在全尺寸液压机械臂上以1 kHz的实时控制频率运行,并同时满足关节和末端执行器的约束。该方法实现了高精度的轨迹跟踪,并在笛卡尔空间中保证了约束的满足。具体性能数据(如轨迹跟踪误差)和与传统控制方法的对比结果(如有)将在论文中详细给出。
🎯 应用场景
该研究成果可应用于各种需要高精度和安全性的重型液压机械臂控制场景,例如建筑、采矿、林业和航空航天等领域。通过保证执行器能力范围内的安全运行,并实现精确的轨迹跟踪,可以提高生产效率、降低操作风险,并扩展机械臂的应用范围。未来,该方法有望推广到其他类型的复杂机器人系统。
📄 摘要(原文)
Heavy-duty hydraulic manipulators (HHMs) operate under strict physical and safety-critical constraints due to their large size, high power, and complex nonlinear dynamics. Ensuring that both joint-level and end-effector trajectories remain compliant with actuator capabilities, such as force, velocity, and position limits, is essential for safe and reliable operation, yet remains largely underexplored in real-time control frameworks. This paper presents a nonlinear model predictive control (NMPC) framework designed to guarantee constraint satisfaction throughout the full nonlinear dynamics of HHMs, while running at a real-time control frequency of 1 kHz. The proposed method combines a multiple-shooting strategy with real-time sensor feedback, and is supported by a robust low-level controller based on virtual decomposition control (VDC) for precise joint tracking. Experimental validation on a full-scale hydraulic manipulator shows that the NMPC framework not only enforces actuator constraints at the joint level, but also ensures constraint-compliant motion in Cartesian space for the end-effector. These results demonstrate the method's capability to deliver high-accuracy trajectory tracking while strictly respecting safety-critical limits, setting a new benchmark for real-time control in large-scale hydraulic systems.