Large language model-based task planning for service robots: A review
作者: Shaohan Bian, Ying Zhang, Guohui Tian, Zhiqiang Miao, Edmond Q. Wu, Simon X. Yang, Changchun Hua
分类: cs.RO
发布日期: 2025-10-27
备注: Submitted to Biomimetic Intelligence and Robotics for possible publication
💡 一句话要点
综述:基于大语言模型的服务机器人任务规划研究进展
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大语言模型 服务机器人 任务规划 机器人自主性 多模态融合
📋 核心要点
- 服务机器人在复杂环境中执行任务时,缺乏鲁棒和精确的任务规划能力,难以高效智能地完成服务。
- 利用大语言模型(LLMs)作为服务机器人的认知核心,提升其自主性和决策能力,从而增强任务规划能力。
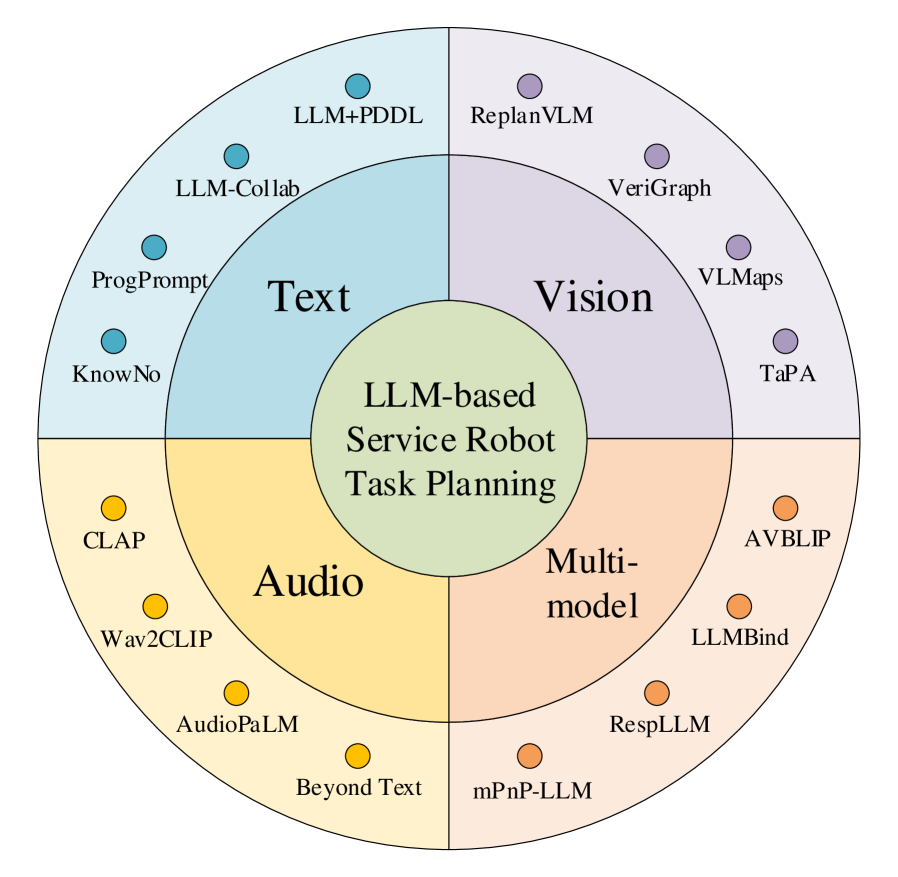
- 分析了LLM驱动的任务规划在文本、视觉、音频和多模态输入等多种模态下的应用进展,并展望了未来发展方向。
📝 摘要(中文)
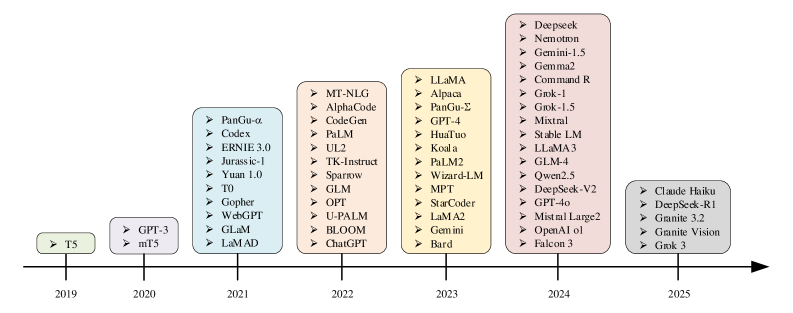
随着大语言模型(LLMs)和机器人技术的快速发展,服务机器人日益融入日常生活,在复杂环境中提供广泛服务。为了智能高效地提供这些服务,强大而准确的任务规划能力至关重要。本文全面概述了LLMs在服务机器人中的集成应用,特别关注其在增强机器人任务规划方面的作用。首先,回顾了LLMs的开发和基础技术,包括预训练、微调、检索增强生成(RAG)和提示工程。然后,探讨了LLMs作为服务机器人的认知核心——“大脑”的应用,讨论了LLMs如何促进自主性和决策能力的提升。此外,分析了LLM驱动的任务规划在各种输入模态(包括文本、视觉、音频和多模态输入)方面的最新进展。最后,总结了当前研究中的关键挑战和局限性,并提出了未来发展方向,以提高服务机器人在复杂、非结构化家庭环境中的任务规划能力。本综述旨在为人工智能和机器人领域的研究人员和从业人员提供有价值的参考。
🔬 方法详解
问题定义:服务机器人需要在复杂、非结构化的环境中执行各种任务,例如家庭服务。现有的任务规划方法在处理复杂指令、理解多模态输入以及适应动态环境方面存在不足,导致服务机器人难以高效、智能地完成任务。
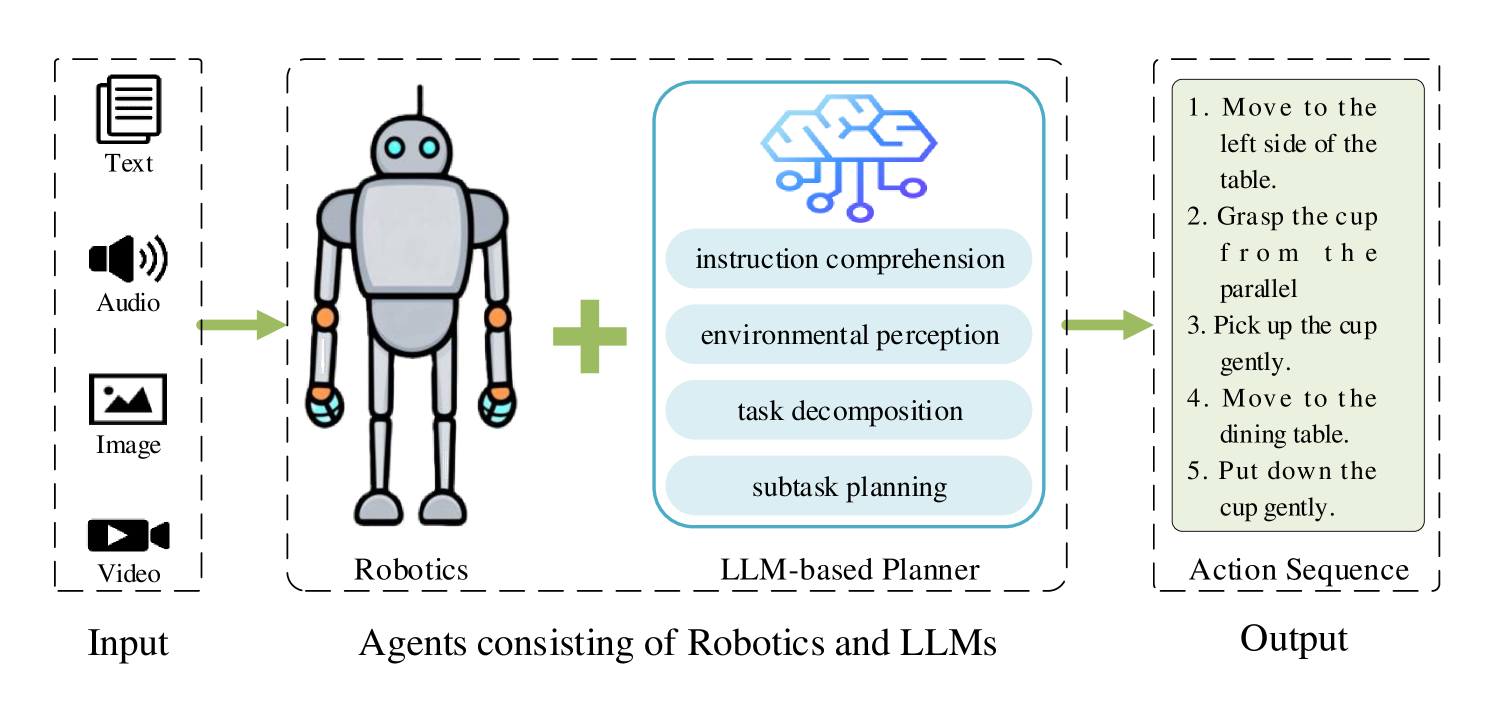
核心思路:利用大语言模型(LLMs)强大的自然语言理解、生成和推理能力,将其作为服务机器人的“大脑”,从而提升机器人的任务规划能力。LLMs可以解析用户指令,理解环境信息,并生成合理的任务执行计划。
技术框架:该综述主要围绕LLMs在服务机器人任务规划中的应用展开,涵盖了以下几个主要方面:1) LLMs的基础技术,包括预训练、微调、检索增强生成(RAG)和提示工程;2) LLMs作为服务机器人认知核心的应用,重点关注如何利用LLMs提升机器人的自主性和决策能力;3) LLM驱动的任务规划在不同输入模态下的应用,包括文本、视觉、音频和多模态输入。
关键创新:该综述的关键创新在于系统性地梳理了LLMs在服务机器人任务规划中的应用,并分析了不同输入模态下的任务规划方法。此外,该综述还总结了当前研究的挑战和局限性,并提出了未来的发展方向。
关键设计:该综述没有涉及具体的参数设置、损失函数或网络结构等技术细节,而是侧重于对现有研究的总结和分析。其中,检索增强生成(RAG)和提示工程是LLM应用中常用的技术,可以有效提升LLM的性能。
🖼️ 关键图片
📊 实验亮点
该综述总结了LLM在服务机器人任务规划中的应用,涵盖了文本、视觉、音频和多模态输入等多种模态。分析了现有方法的优缺点,并指出了未来研究方向,例如如何提高LLM在复杂环境中的鲁棒性和泛化能力,以及如何将LLM与其他机器人技术更好地结合。
🎯 应用场景
该研究成果可应用于各种服务机器人,例如家庭服务机器人、医疗机器人、教育机器人等。通过提升服务机器人的任务规划能力,可以使其更好地理解用户需求,更高效地完成任务,从而提高用户体验。未来,随着LLMs和机器人技术的不断发展,服务机器人将在更多领域发挥重要作用。
📄 摘要(原文)
With the rapid advancement of large language models (LLMs) and robotics, service robots are increasingly becoming an integral part of daily life, offering a wide range of services in complex environments. To deliver these services intelligently and efficiently, robust and accurate task planning capabilities are essential. This paper presents a comprehensive overview of the integration of LLMs into service robotics, with a particular focus on their role in enhancing robotic task planning. First, the development and foundational techniques of LLMs, including pre-training, fine-tuning, retrieval-augmented generation (RAG), and prompt engineering, are reviewed. We then explore the application of LLMs as the cognitive core-`brain'-of service robots, discussing how LLMs contribute to improved autonomy and decision-making. Furthermore, recent advancements in LLM-driven task planning across various input modalities are analyzed, including text, visual, audio, and multimodal inputs. Finally, we summarize key challenges and limitations in current research and propose future directions to advance the task planning capabilities of service robots in complex, unstructured domestic environments. This review aims to serve as a valuable reference for researchers and practitioners in the fields of artificial intelligence and robotics.