Workspace Registration and Collision Detection for Industrial Robotics Applications
作者: Klaus Zauner, Josef El Dib, Hubert Gattringer, Andreas Mueller
分类: cs.RO
发布日期: 2025-10-27
期刊: Proceedings AIRoV - The First Austrian Symposium on AI, Robotics, and Vision, 25.-27.3.2024, Innsbruck, March 2024
💡 一句话要点
针对工业机器人应用,提出工作空间注册与碰撞检测方案
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 工业机器人 工作空间注册 碰撞检测 点云处理 区域生长分割
📋 核心要点
- 工业机器人运动规划需要精确的环境信息,现有方法在复杂环境下难以准确识别碰撞物。
- 该论文提出了一种基于点云数据的工业机器人工作空间注册与碰撞检测方法,利用传感器获取环境信息。
- 通过区域生长分割和VCCS算法识别碰撞物体,并比较不同传感器的性能,验证了方案的可行性。
📝 摘要(中文)
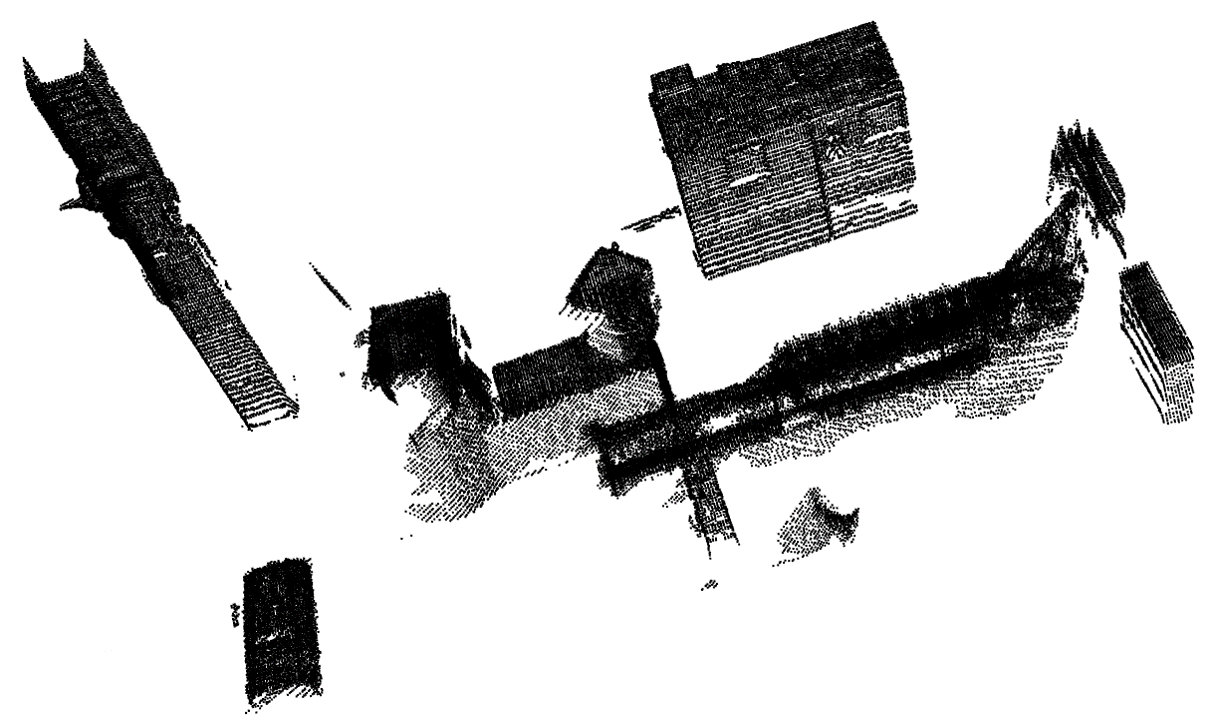
为了使机器人能够定义受限区域并考虑碰撞物体,机器人运动规划依赖于对环境的精确认知。本文利用各种传感器获取环境的点云数据来捕获工作空间。通过区域生长分割和VCCS算法识别碰撞物体,随后对点云簇进行近似。本文旨在比较不同的传感器,阐述从检测到最终碰撞环境的过程,并检测机器人与该环境之间的碰撞。
🔬 方法详解
问题定义:工业机器人需要在复杂环境中安全可靠地执行任务,因此需要精确的工作空间模型和有效的碰撞检测机制。现有方法在处理复杂场景、噪声数据和遮挡问题时存在不足,难以保证机器人运动规划的安全性。论文旨在解决如何高效、准确地构建机器人工作空间模型并进行碰撞检测的问题。
核心思路:论文的核心思路是利用多种传感器获取环境的点云数据,通过点云处理和分割算法提取潜在的碰撞物体,并建立机器人的工作空间模型。通过比较不同传感器的性能,选择合适的传感器组合,提高环境感知的准确性和鲁棒性。
技术框架:该方法主要包含以下几个阶段:1) 使用多种传感器(具体传感器类型未知)获取机器人工作空间的点云数据;2) 对点云数据进行预处理,包括去噪、滤波等操作;3) 使用区域生长分割和VCCS算法对点云数据进行分割,提取潜在的碰撞物体;4) 对分割后的点云簇进行近似,建立碰撞物体的几何模型;5) 基于建立的工作空间模型,进行机器人与环境之间的碰撞检测。
关键创新:论文的关键创新在于结合了区域生长分割和VCCS算法,用于从点云数据中提取碰撞物体。通过比较不同传感器的性能,为实际应用中传感器的选择提供了参考。
关键设计:论文中关于区域生长分割和VCCS算法的具体参数设置、点云预处理方法、以及碰撞检测算法的细节描述不足,具体实现细节未知。传感器类型和数量也未知。
🖼️ 关键图片


📊 实验亮点
论文比较了不同传感器在工作空间注册和碰撞检测中的性能,但具体的性能指标和对比结果未在摘要中体现。区域生长分割和VCCS算法在碰撞物体识别中的效果也未给出量化数据。因此,实验亮点细节未知。
🎯 应用场景
该研究成果可应用于各种工业机器人应用场景,例如自动化装配、焊接、喷涂等。通过精确的工作空间注册和碰撞检测,可以提高机器人操作的安全性、效率和可靠性,降低生产成本,并为实现更高级的机器人自主导航和操作提供基础。
📄 摘要(原文)
Motion planning for robotic manipulators relies on precise knowledge of the environment in order to be able to define restricted areas and to take collision objects into account. To capture the workspace, point clouds of the environment are acquired using various sensors. The collision objects are identified by region growing segmentation and VCCS algorithm. Subsequently the point clusters are approximated. The aim of the present paper is to compare different sensors, to illustrate the process from detection to the finished collision environment and to detect collisions between the robot and this environment.