ManiDP: Manipulability-Aware Diffusion Policy for Posture-Dependent Bimanual Manipulation
作者: Zhuo Li, Junjia Liu, Dianxi Li, Tao Teng, Miao Li, Sylvain Calinon, Darwin Caldwell, Fei Chen
分类: cs.RO
发布日期: 2025-10-27
备注: 7 pages, 6 figures, Accepted and published in IROS 2025
💡 一句话要点
ManiDP:面向姿态依赖的双臂操作,提出可操作性感知的扩散策略
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 双臂操作 扩散模型 模仿学习 可操作性 姿态依赖 机器人技能学习 黎曼流形
📋 核心要点
- 现有双臂机器人技能学习方法忽略了姿态依赖的任务特征,难以适应复杂操作中对力和速度的特定需求。
- ManiDP通过提取专家演示中的双臂可操作性,并将其编码为姿态特征,融入条件扩散模型中,引导生成任务兼容的运动序列。
- 实验结果表明,ManiDP在真实双臂任务中,操作成功率平均提升39.33%,任务兼容性提升0.45,显著优于基线方法。
📝 摘要(中文)
本文提出了一种名为可操作性感知扩散策略(ManiDP)的模仿学习方法,旨在解决现有方法在机器人双臂技能学习中忽略姿态依赖任务特征的问题。ManiDP不仅生成合理的双臂轨迹,还优化双臂配置,以更好地满足姿态相关的任务需求。该方法通过从专家演示中提取双臂可操作性,并使用基于黎曼的概率模型对封装的姿态特征进行编码。然后,将这些编码的姿态特征整合到条件扩散过程中,以指导生成与任务兼容的双臂运动序列。在六个真实世界的双臂任务上的评估结果表明,与基线方法相比,ManiDP的平均操作成功率提高了39.33%,任务兼容性提高了0.45。这项工作强调了将姿态相关的机器人先验知识整合到双臂技能扩散中的重要性,从而实现类似人类的适应性和灵巧性。
🔬 方法详解
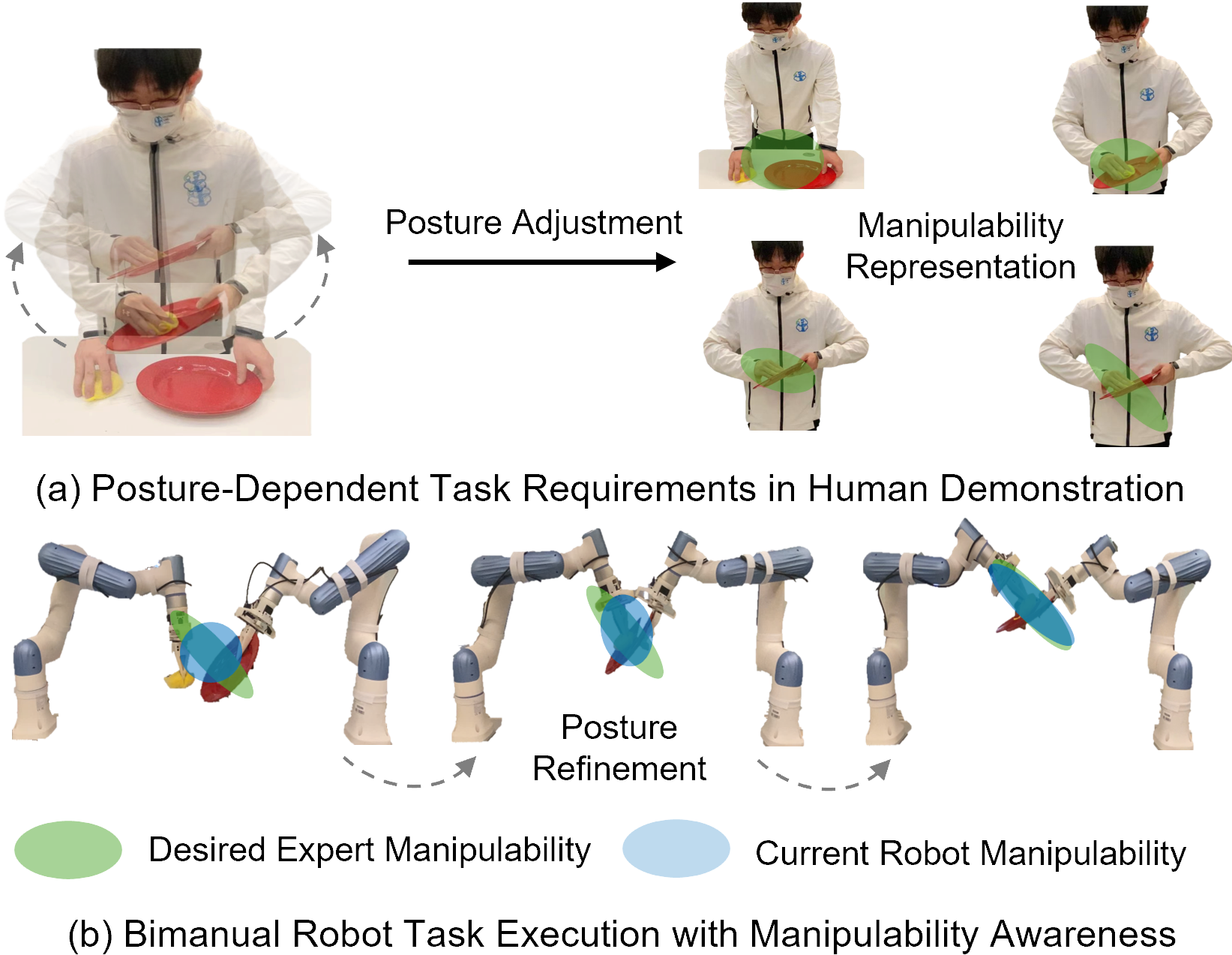
问题定义:现有基于扩散模型的双臂操作学习方法,未能充分考虑双臂姿态对操作性能的影响。在需要精细控制力和速度的复杂操作任务中,不同的双臂姿态会显著影响操作的难易程度和成功率。因此,如何学习并利用姿态相关的任务特征,是提升双臂操作性能的关键挑战。
核心思路:ManiDP的核心思路是,将双臂的“可操作性”作为一种姿态相关的先验知识,融入到扩散模型的学习过程中。通过学习专家演示中的双臂姿态和对应的可操作性指标,ManiDP能够生成既符合任务要求,又具有良好可操作性的双臂运动轨迹。这样可以使机器人在执行任务时,能够选择更合适的姿态,从而提高操作的成功率和效率。
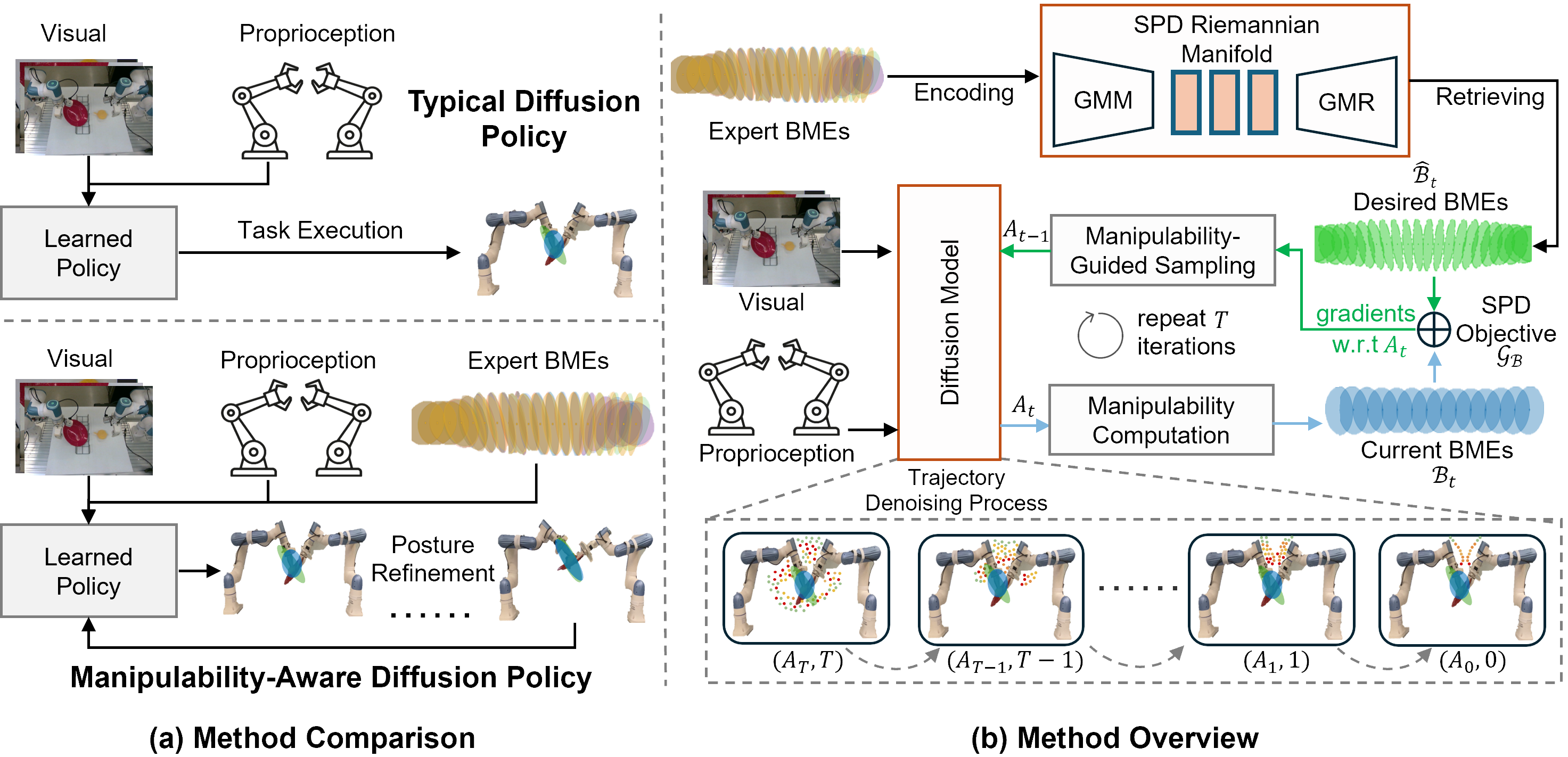
技术框架:ManiDP的整体框架包含以下几个主要模块:1) 专家演示数据收集:收集包含双臂运动轨迹和对应姿态的专家演示数据。2) 可操作性提取与编码:从专家演示数据中提取双臂的可操作性指标,并使用基于黎曼流形的概率模型对姿态特征进行编码。3) 条件扩散模型:构建一个条件扩散模型,将编码后的姿态特征作为条件,指导生成双臂运动轨迹。4) 轨迹优化:对生成的轨迹进行优化,以进一步提高其可操作性和任务兼容性。
关键创新:ManiDP的关键创新在于,将双臂的“可操作性”这一机器人领域的先验知识,有效地融入到扩散模型的学习过程中。通过学习姿态相关的可操作性特征,ManiDP能够生成更符合任务要求的双臂运动轨迹,从而显著提升操作性能。与现有方法相比,ManiDP能够更好地利用专家演示数据中的信息,并生成更具泛化能力的双臂操作策略。
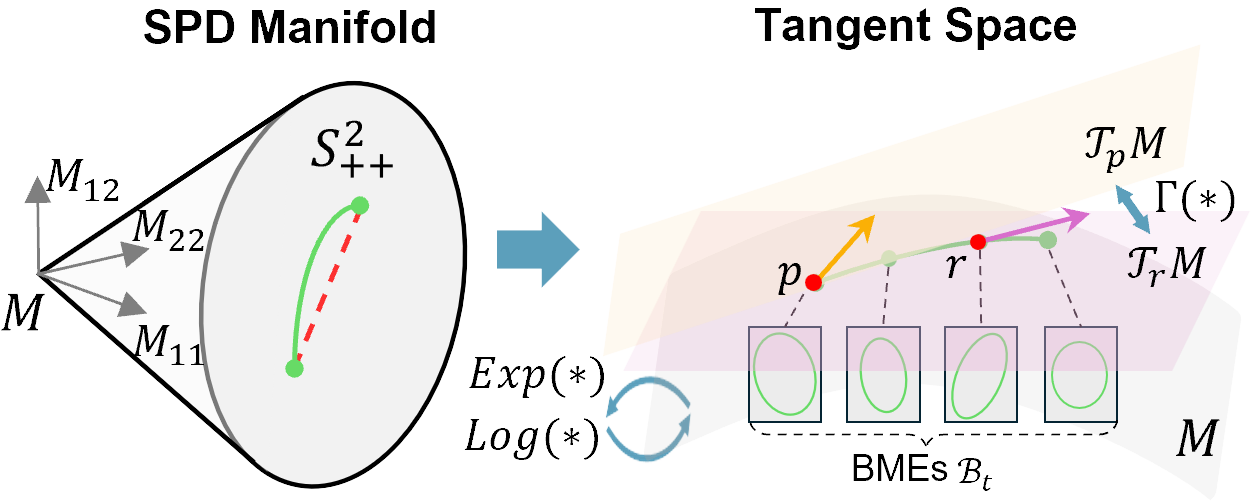
关键设计:在可操作性提取方面,论文采用了标准的可操作性椭球来量化双臂姿态的可操作性。在姿态特征编码方面,论文使用了基于黎曼流形的概率模型,以更好地捕捉姿态空间的几何结构。在条件扩散模型方面,论文将编码后的姿态特征作为条件,通过调整扩散过程中的噪声分布,来引导生成符合任务要求的双臂运动轨迹。损失函数包括轨迹重构损失、可操作性损失和任务兼容性损失,以确保生成的轨迹既符合专家演示,又具有良好的可操作性和任务兼容性。
🖼️ 关键图片
📊 实验亮点
ManiDP在六个真实世界的双臂操作任务上进行了评估,实验结果表明,与基线方法相比,ManiDP的平均操作成功率提高了39.33%,任务兼容性提高了0.45。这些结果表明,ManiDP能够有效地学习姿态相关的任务特征,并生成更符合任务要求的双臂运动轨迹,从而显著提升操作性能。
🎯 应用场景
ManiDP在需要高精度和灵活性的双臂操作任务中具有广泛的应用前景,例如:工业装配、医疗手术、家庭服务等。通过学习人类专家的操作经验,ManiDP可以使机器人能够执行更加复杂和精细的双臂操作任务,提高生产效率和服务质量。未来,ManiDP还可以与其他技术相结合,例如:强化学习、视觉伺服等,以进一步提升机器人的自主操作能力。
📄 摘要(原文)
Recent work has demonstrated the potential of diffusion models in robot bimanual skill learning. However, existing methods ignore the learning of posture-dependent task features, which are crucial for adapting dual-arm configurations to meet specific force and velocity requirements in dexterous bimanual manipulation. To address this limitation, we propose Manipulability-Aware Diffusion Policy (ManiDP), a novel imitation learning method that not only generates plausible bimanual trajectories, but also optimizes dual-arm configurations to better satisfy posture-dependent task requirements. ManiDP achieves this by extracting bimanual manipulability from expert demonstrations and encoding the encapsulated posture features using Riemannian-based probabilistic models. These encoded posture features are then incorporated into a conditional diffusion process to guide the generation of task-compatible bimanual motion sequences. We evaluate ManiDP on six real-world bimanual tasks, where the experimental results demonstrate a 39.33$\%$ increase in average manipulation success rate and a 0.45 improvement in task compatibility compared to baseline methods. This work highlights the importance of integrating posture-relevant robotic priors into bimanual skill diffusion to enable human-like adaptability and dexterity.