PIP-LLM: Integrating PDDL-Integer Programming with LLMs for Coordinating Multi-Robot Teams Using Natural Language
作者: Guangyao Shi, Yuwei Wu, Vijay Kumar, Gaurav S. Sukhatme
分类: cs.RO, cs.AI
发布日期: 2025-10-26
💡 一句话要点
PIP-LLM:融合PDDL与整数规划,利用自然语言协调多机器人团队
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人协调 自然语言指令 PDDL规划 整数规划 任务分配
📋 核心要点
- 现有方法在多机器人协调中存在任务分解脆弱、可扩展性差和协调效率低等问题。
- PIP-LLM将规划分解为团队级PDDL规划和机器人级整数规划,分离规划和分配,提高效率。
- 实验表明,PIP-LLM提高了规划成功率,降低了旅行成本,并实现了更好的负载平衡。
📝 摘要(中文)
本文提出了一种基于语言的多机器人协调框架PIP-LLM,旨在使机器人团队能够执行自然语言指令,并将高级指令转化为可行、高效的多机器人规划。现有方法在单机器人场景中,大型语言模型(LLMs)与规划领域描述语言(PDDL)结合展现出潜力,但在多机器人协调方面存在任务分解脆弱、可扩展性差和协调效率低等问题。PIP-LLM由基于PDDL的团队级规划和基于整数规划(IP)的机器人级规划组成。首先,将命令翻译成团队级PDDL问题并求解,获得团队级规划,抽象出机器人分配。然后,将此规划转换为表示子任务依赖关系的依赖图,指导机器人级规划,其中每个子任务节点被公式化为基于IP的任务分配问题,显式优化旅行成本和工作负载,同时尊重机器人能力和用户定义的约束。这种规划与分配的分离使PIP-LLM能够避免基于语法的分解的缺陷,并扩展到更大的团队。在各种任务上的实验表明,与最先进的基线相比,PIP-LLM提高了规划成功率,降低了最大和平均旅行成本,并实现了更好的负载平衡。
🔬 方法详解
问题定义:论文旨在解决多机器人团队在自然语言指令下的协调规划问题。现有方法,特别是直接将LLM与PDDL结合的方法,在多机器人场景中面临任务分解困难、可扩展性差以及协调效率低下的挑战。这些方法通常依赖于基于语法的分解,容易产生脆弱的规划,难以适应复杂环境和大规模团队。
核心思路:PIP-LLM的核心思路是将多机器人协调规划问题分解为两个层次:团队级规划和机器人级规划。团队级规划负责生成抽象的任务序列,而机器人级规划负责将这些任务分配给具体的机器人并优化执行路径。这种分离使得系统能够更好地处理复杂任务和大规模团队,同时提高规划效率和鲁棒性。
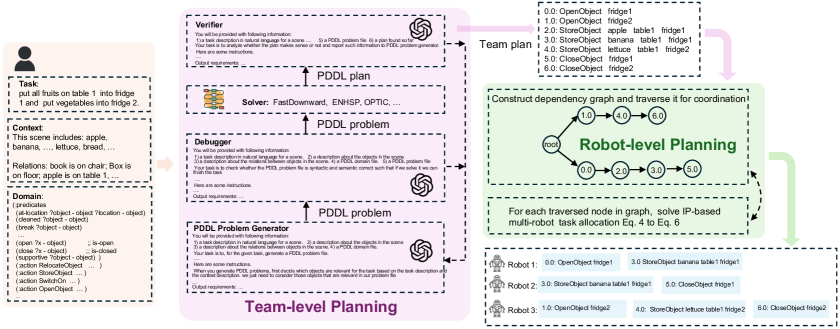
技术框架:PIP-LLM的整体框架包含以下几个主要模块:1) 自然语言指令解析:将自然语言指令转换为团队级PDDL问题。2) 团队级规划:使用PDDL求解器生成团队级规划,该规划描述了需要完成的任务序列,但没有指定由哪个机器人执行。3) 依赖图生成:将团队级规划转换为依赖图,该图表示了任务之间的依赖关系。4) 机器人级规划:对于依赖图中的每个任务节点,将其公式化为基于整数规划(IP)的任务分配问题,优化旅行成本和工作负载,同时考虑机器人能力和用户定义的约束。5) 机器人执行:机器人根据规划结果执行任务。
关键创新:PIP-LLM的关键创新在于将团队级规划和机器人级规划分离,并使用依赖图来指导机器人级规划。这种分离使得系统能够避免基于语法的分解的缺陷,并扩展到更大的团队。此外,使用整数规划来优化任务分配,能够显式地考虑旅行成本、工作负载和机器人能力,从而生成更高效的规划。
关键设计:在机器人级规划中,每个子任务节点被建模为一个整数规划问题。目标函数通常包括最小化总旅行成本和平衡机器人工作负载。约束条件包括机器人能力约束(例如,某些机器人可能无法执行某些任务)、任务依赖关系约束(例如,某些任务必须在其他任务完成之后才能开始)和用户定义的约束(例如,某些任务必须由特定的机器人执行)。整数规划求解器用于找到最优的任务分配方案。
🖼️ 关键图片

📊 实验亮点
实验结果表明,PIP-LLM在多个任务上优于现有基线方法。具体来说,PIP-LLM提高了规划成功率,降低了最大和平均旅行成本,并实现了更好的负载平衡。例如,在某个任务中,PIP-LLM的平均旅行成本比最先进的基线方法降低了15%。这些结果表明,PIP-LLM是一种有效且高效的多机器人协调框架。
🎯 应用场景
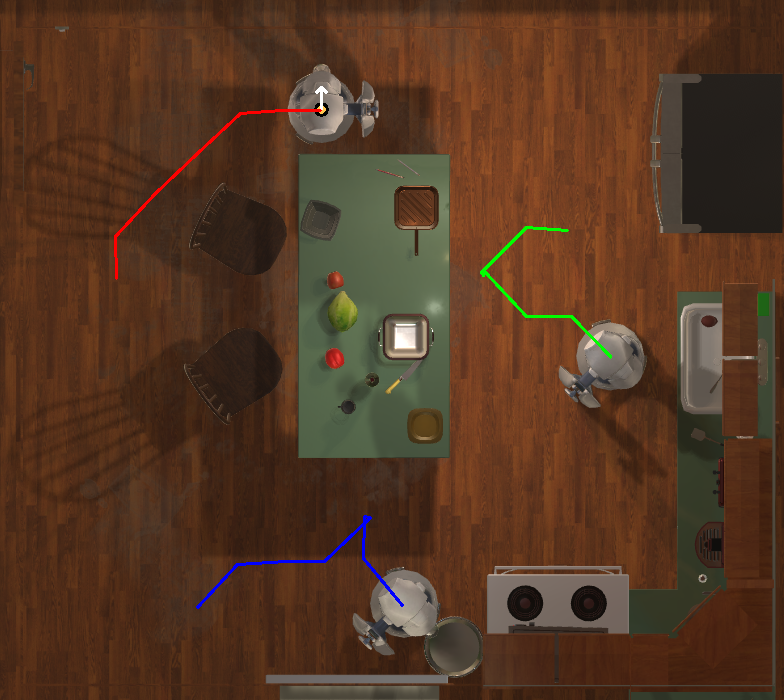
PIP-LLM可应用于各种需要多机器人协同完成任务的场景,例如仓库自动化、搜索救援、环境监测和智能制造。该框架能够将自然语言指令转化为具体的机器人行动计划,降低了用户与机器人团队交互的门槛,提高了任务执行效率和灵活性。未来,该研究可进一步扩展到更复杂的任务环境和更大规模的机器人团队。
📄 摘要(原文)
Enabling robot teams to execute natural language commands requires translating high-level instructions into feasible, efficient multi-robot plans. While Large Language Models (LLMs) combined with Planning Domain Description Language (PDDL) offer promise for single-robot scenarios, existing approaches struggle with multi-robot coordination due to brittle task decomposition, poor scalability, and low coordination efficiency. We introduce PIP-LLM, a language-based coordination framework that consists of PDDL-based team-level planning and Integer Programming (IP) based robot-level planning. PIP-LLMs first decomposes the command by translating the command into a team-level PDDL problem and solves it to obtain a team-level plan, abstracting away robot assignment. Each team-level action represents a subtask to be finished by the team. Next, this plan is translated into a dependency graph representing the subtasks' dependency structure. Such a dependency graph is then used to guide the robot-level planning, in which each subtask node will be formulated as an IP-based task allocation problem, explicitly optimizing travel costs and workload while respecting robot capabilities and user-defined constraints. This separation of planning from assignment allows PIP-LLM to avoid the pitfalls of syntax-based decomposition and scale to larger teams. Experiments across diverse tasks show that PIP-LLM improves plan success rate, reduces maximum and average travel costs, and achieves better load balancing compared to state-of-the-art baselines.