RoGER-SLAM: A Robust Gaussian Splatting SLAM System for Noisy and Low-light Environment Resilience
作者: Huilin Yin, Zhaolin Yang, Linchuan Zhang, Gerhard Rigoll, Johannes Betz
分类: cs.RO, cs.AI
发布日期: 2025-10-26
备注: 13 pages, 11 figures, under review
💡 一句话要点
RoGER-SLAM:面向噪声和低光环境的鲁棒高斯溅射SLAM系统
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: SLAM 3D高斯溅射 鲁棒性 低光照 噪声 CLIP 机器人导航
📋 核心要点
- 现有基于3D高斯溅射的SLAM方法在噪声和低光照等恶劣环境下性能显著下降,难以保证地图构建和跟踪的可靠性。
- RoGER-SLAM通过结构保持的鲁棒融合、自适应跟踪目标和CLIP增强模块,提升了SLAM系统在恶劣环境下的鲁棒性和重建质量。
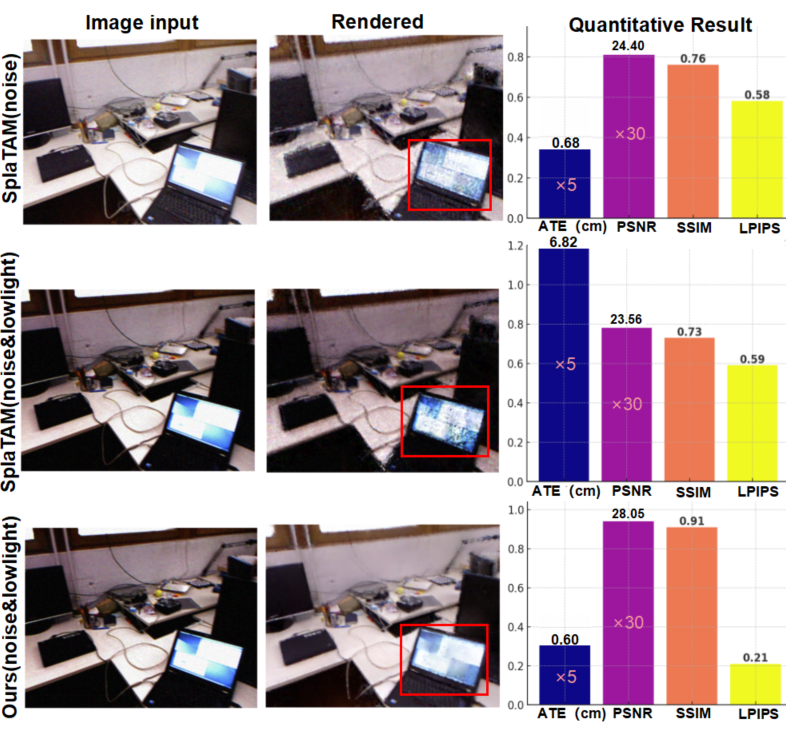
- 实验结果表明,RoGER-SLAM在Replica、TUM和真实世界数据集上,相比其他3DGS-SLAM系统,显著提高了轨迹精度和重建质量。
📝 摘要(中文)
同时定位与地图构建(SLAM)的可靠性在视觉输入受到噪声和低照度影响的环境中受到严重限制。虽然最近基于3D高斯溅射(3DGS)的SLAM框架在干净条件下实现了高保真度的地图构建,但它们仍然容易受到复合退化的影响,从而降低了地图构建和跟踪性能。我们的工作基于一个关键观察,即原始3DGS渲染管线本质上表现为隐式低通滤波器,衰减高频噪声,但也存在过度平滑的风险。基于此,我们提出了RoGER-SLAM,一个为噪声和低光弹性定制的鲁棒3DGS SLAM系统。该框架集成了三项创新:一种结构保持的鲁棒融合(SP-RoFusion)机制,耦合了渲染的外观、深度和边缘线索;一种具有残差平衡正则化的自适应跟踪目标;以及一个基于对比语言-图像预训练(CLIP)的增强模块,在复合退化下选择性激活以恢复语义和结构保真度。在Replica、TUM和真实世界序列上的综合实验表明,与其他3DGS-SLAM系统相比,RoGER-SLAM始终如一地提高了轨迹精度和重建质量,尤其是在不利的成像条件下。
🔬 方法详解
问题定义:现有的基于3D高斯溅射(3DGS)的SLAM系统在干净的环境下表现良好,但在噪声和低光照等恶劣环境下,由于视觉信息的退化,其地图构建和跟踪性能会显著下降。这些系统容易受到噪声的干扰,并且过度依赖高质量的视觉特征,导致在实际应用中鲁棒性不足。
核心思路:RoGER-SLAM的核心思路是利用3DGS渲染管线的固有低通滤波特性,并在此基础上通过引入结构保持的鲁棒融合机制、自适应跟踪目标和CLIP增强模块,来增强系统对噪声和低光照环境的适应性。通过融合多种信息源,并利用预训练的CLIP模型,可以有效地恢复图像的语义和结构信息,从而提高SLAM系统的鲁棒性。
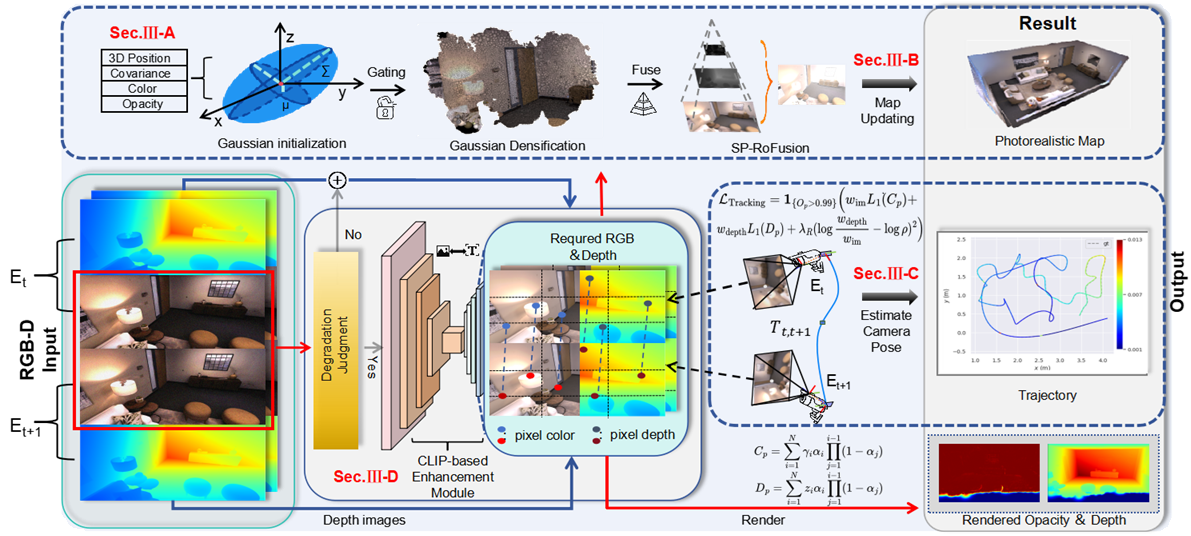
技术框架:RoGER-SLAM的整体框架包括以下几个主要模块:1) 结构保持的鲁棒融合(SP-RoFusion)模块,用于融合渲染的外观、深度和边缘信息,以提高对噪声的鲁棒性。2) 自适应跟踪目标模块,通过残差平衡正则化来优化跟踪过程,使其对噪声和光照变化更加稳定。3) CLIP增强模块,在检测到图像质量下降时,利用CLIP模型恢复图像的语义和结构信息。整个系统以3DGS为基础,通过优化高斯参数来实现地图构建和定位。
关键创新:RoGER-SLAM的关键创新在于其针对噪声和低光照环境的特殊设计。SP-RoFusion模块通过融合多种信息源,有效地抑制了噪声的影响。自适应跟踪目标模块通过动态调整跟踪权重,提高了跟踪的稳定性。CLIP增强模块则利用预训练的CLIP模型,在图像质量严重下降时,恢复图像的语义和结构信息,从而保证了SLAM系统的鲁棒性。
关键设计:SP-RoFusion模块的关键设计在于如何有效地融合外观、深度和边缘信息。论文中采用了加权融合的方式,根据不同信息源的可靠性动态调整权重。自适应跟踪目标模块的关键设计在于残差平衡正则化的引入,通过平衡不同残差项的贡献,避免了某些残差项对优化过程的过度影响。CLIP增强模块的关键设计在于如何有效地利用CLIP模型恢复图像信息,论文中采用了选择性激活的策略,只在图像质量严重下降时才激活该模块,以避免对正常情况下的性能产生负面影响。
🖼️ 关键图片

📊 实验亮点
RoGER-SLAM在Replica、TUM和真实世界数据集上进行了全面的实验评估。结果表明,在噪声和低光照条件下,RoGER-SLAM相比于其他3DGS-SLAM系统,显著提高了轨迹精度和重建质量。例如,在TUM数据集的fr3/nostructure_texture序列中,RoGER-SLAM的ATE RMSE降低了超过50%。CLIP增强模块的引入也显著提高了在极端条件下的重建质量。
🎯 应用场景
RoGER-SLAM在机器人导航、自动驾驶、增强现实等领域具有广泛的应用前景。尤其是在光照条件不佳或存在大量噪声的环境中,例如夜间、水下、矿井等场景,RoGER-SLAM能够提供更稳定可靠的定位和地图构建服务,从而提高相关应用的性能和安全性。该研究还有助于推动SLAM技术在更复杂和恶劣环境下的应用。
📄 摘要(原文)
The reliability of Simultaneous Localization and Mapping (SLAM) is severely constrained in environments where visual inputs suffer from noise and low illumination. Although recent 3D Gaussian Splatting (3DGS) based SLAM frameworks achieve high-fidelity mapping under clean conditions, they remain vulnerable to compounded degradations that degrade mapping and tracking performance. A key observation underlying our work is that the original 3DGS rendering pipeline inherently behaves as an implicit low-pass filter, attenuating high-frequency noise but also risking over-smoothing. Building on this insight, we propose RoGER-SLAM, a robust 3DGS SLAM system tailored for noise and low-light resilience. The framework integrates three innovations: a Structure-Preserving Robust Fusion (SP-RoFusion) mechanism that couples rendered appearance, depth, and edge cues; an adaptive tracking objective with residual balancing regularization; and a Contrastive Language-Image Pretraining (CLIP)-based enhancement module, selectively activated under compounded degradations to restore semantic and structural fidelity. Comprehensive experiments on Replica, TUM, and real-world sequences show that RoGER-SLAM consistently improves trajectory accuracy and reconstruction quality compared with other 3DGS-SLAM systems, especially under adverse imaging conditions.