Toward Humanoid Brain-Body Co-design: Joint Optimization of Control and Morphology for Fall Recovery
作者: Bo Yue, Sheng Xu, Kui Jia, Guiliang Liu
分类: cs.RO, cs.AI
发布日期: 2025-10-25 (更新: 2025-11-05)
💡 一句话要点
提出RoboCraft框架,联合优化人形机器人控制与形态,提升跌倒恢复能力。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 协同设计 跌倒恢复 强化学习 形态优化
📋 核心要点
- 现有方法在人形机器人跌倒恢复方面存在不足,难以兼顾控制策略和形态优化。
- RoboCraft框架通过联合优化控制策略和形态,并利用共享策略微调和人类启发式搜索,提升跌倒恢复性能。
- 实验表明,RoboCraft在多个机器人上取得了显著的性能提升,证明了协同设计的有效性。
📝 摘要(中文)
人形机器人是具身智能的关键前沿,其拟人形态使其能够自然地部署在人类工作空间中。人形机器人的脑-体协同设计通过联合优化控制策略和物理形态,为实现这一潜力提供了一种有前景的方法。在此背景下,跌倒恢复成为一项关键能力,它不仅增强了安全性和鲁棒性,还与运动系统自然集成,从而提高了人形机器人的自主性。本文提出了RoboCraft,一个可扩展的人形机器人协同设计框架,用于跌倒恢复,通过控制策略和形态的耦合更新迭代地提高性能。一个在多个设计上预训练的共享策略在高表现形态上逐步微调,从而实现高效的适应,而无需从头开始重新训练。同时,形态搜索由受人类启发的先验知识和优化算法指导,并由一个优先级缓冲区支持,该缓冲区平衡了对有希望的候选者的重新评估与对新颖设计的探索。实验表明,RoboCraft在七个公共人形机器人上实现了平均44.55%的性能提升,其中形态优化驱动了四个人形机器人协同设计中至少40%的改进,突出了人形机器人协同设计的关键作用。
🔬 方法详解
问题定义:论文旨在解决人形机器人跌倒后的恢复问题。现有方法通常独立地设计控制策略和机器人形态,忽略了二者之间的相互影响,导致恢复效果不佳。此外,从头开始训练每个形态的控制策略计算成本高昂。
核心思路:论文的核心思路是进行脑-体协同设计,即同时优化控制策略和机器人形态。通过这种联合优化,可以找到更适合特定控制策略的机器人形态,从而提高跌倒恢复的性能。此外,论文利用共享策略和微调技术,降低了训练成本。
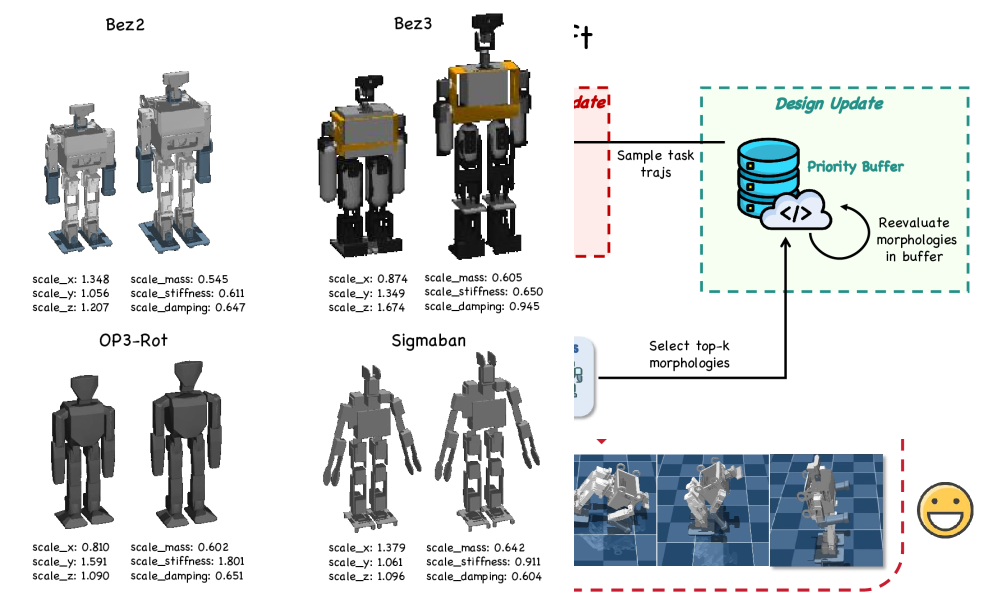
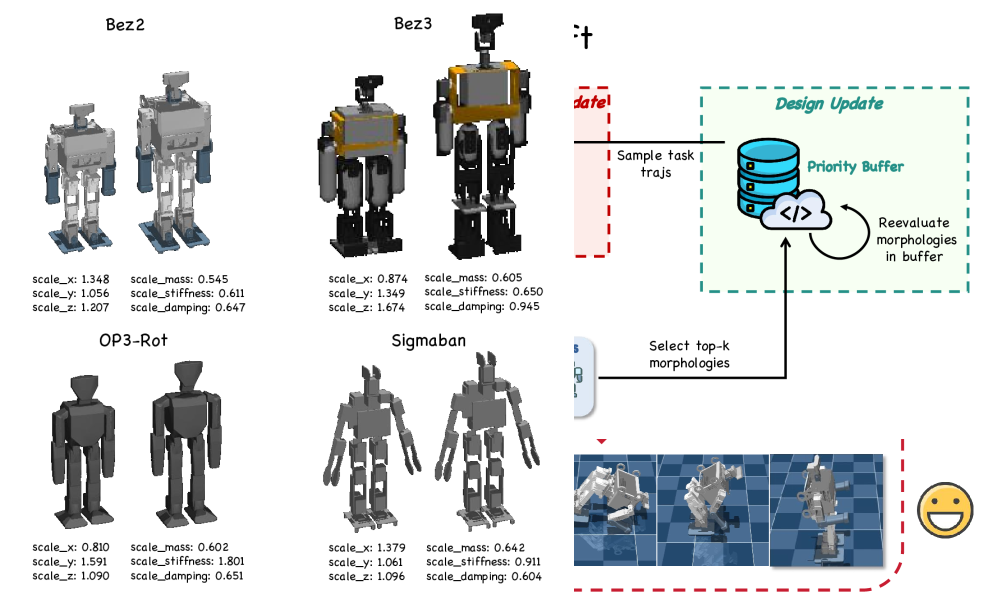
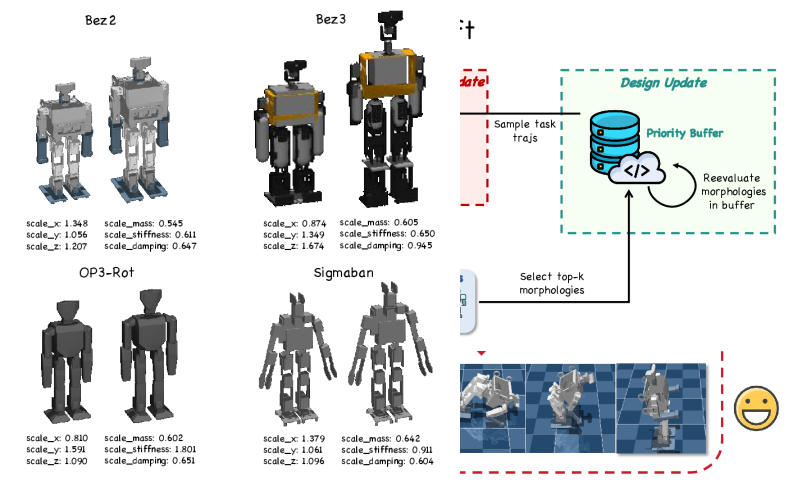
技术框架:RoboCraft框架包含两个主要模块:控制策略优化和形态优化。控制策略优化模块使用强化学习算法训练一个共享策略,并在高表现形态上进行微调。形态优化模块则基于人类启发式先验知识和优化算法搜索更优的机器人形态。两个模块通过迭代更新,不断提高整体性能。优先级缓冲区用于平衡对有希望的候选形态的重新评估和对新形态的探索。
关键创新:论文的关键创新在于提出了一个可扩展的人形机器人协同设计框架,能够同时优化控制策略和形态。此外,利用共享策略和微调技术,显著降低了训练成本。人类启发式先验知识的引入,加速了形态搜索过程。
关键设计:控制策略采用深度强化学习算法进行训练,奖励函数的设计考虑了跌倒恢复的多个方面,如平衡性、速度和稳定性。形态优化模块使用遗传算法或类似的优化算法,搜索机器人的关节角度、连杆长度等参数。优先级缓冲区根据形态的表现和新颖性来决定哪些形态应该被重新评估。
🖼️ 关键图片
📊 实验亮点
实验结果表明,RoboCraft框架在七个公共人形机器人上实现了平均44.55%的性能提升。形态优化在四个人形机器人的协同设计中贡献了至少40%的改进,证明了形态优化的重要性。这些结果表明,RoboCraft框架能够有效地提高人形机器人的跌倒恢复能力。
🎯 应用场景
该研究成果可应用于各种人形机器人应用场景,例如灾难救援、医疗辅助、家庭服务等。通过提高人形机器人的跌倒恢复能力,可以增强其在复杂环境中的适应性和安全性,使其能够更好地完成各种任务。此外,该研究提出的协同设计方法也为其他机器人系统的设计提供了新的思路。
📄 摘要(原文)
Humanoid robots represent a central frontier in embodied intelligence, as their anthropomorphic form enables natural deployment in humans' workspace. Brain-body co-design for humanoids presents a promising approach to realizing this potential by jointly optimizing control policies and physical morphology. Within this context, fall recovery emerges as a critical capability. It not only enhances safety and resilience but also integrates naturally with locomotion systems, thereby advancing the autonomy of humanoids. In this paper, we propose RoboCraft, a scalable humanoid co-design framework for fall recovery that iteratively improves performance through the coupled updates of control policy and morphology. A shared policy pretrained across multiple designs is progressively finetuned on high-performing morphologies, enabling efficient adaptation without retraining from scratch. Concurrently, morphology search is guided by human-inspired priors and optimization algorithms, supported by a priority buffer that balances reevaluation of promising candidates with the exploration of novel designs. Experiments show that RoboCraft achieves an average performance gain of 44.55% on seven public humanoid robots, with morphology optimization drives at least 40% of improvements in co-designing four humanoid robots, underscoring the critical role of humanoid co-design.