Human-Inspired Neuro-Symbolic World Modeling and Logic Reasoning for Interpretable Safe UAV Landing Site Assessment
作者: Weixian Qian, Tianyi Yang, Sebastian Schroder, Yao Deng, Jiaohong Yao, Xiao Cheng, Richard Han, Xi Zheng
分类: cs.RO, cs.AI
发布日期: 2025-10-25 (更新: 2026-02-01)
💡 一句话要点
NeuroSymLand:结合神经符号推理,实现可解释的安全无人机着陆点评估
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 神经符号推理 无人机着陆 安全评估 世界建模 逻辑推理
📋 核心要点
- 现有基于学习的着陆点评估方法在协变量偏移下性能下降,且透明度有限,难以解释和验证。
- NeuroSymLand通过神经符号方法,分离感知驱动的世界建模和逻辑推理,提升安全评估的准确性和可解释性。
- 实验表明,NeuroSymLand在着陆点评估任务中优于现有方法,并具有良好的可解释性和边缘部署能力。
📝 摘要(中文)
本文提出NeuroSymLand,一个神经符号框架,用于无人机(UAV)着陆点安全评估,无需标记。该框架将感知驱动的世界建模与基于逻辑的安全推理显式分离。轻量级分割模型增量构建概率语义场景图,编码对象、属性和空间关系。通过人工参与的大型语言模型离线合成符号安全规则,并在运行时直接在世界模型上执行,进行白盒推理,生成排序后的着陆候选点,并提供人类可读的潜在安全约束解释。在72个模拟和硬件在环着陆场景中,NeuroSymLand成功评估了61个场景,优于四个竞争基线(37到57个成功案例)。定性分析突出了其卓越的可解释性和透明推理,且部署边缘开销可忽略不计。结果表明,结合显式世界建模和符号推理可以支持移动系统中准确、可解释和可边缘部署的安全评估,如无人机着陆点评估所示。
🔬 方法详解
问题定义:无人机在非结构化环境中安全着陆点评估是一个关键问题。现有基于学习的方法泛化能力差,在面对新的环境时性能会显著下降,并且缺乏透明度,难以理解其决策过程,这在安全攸关的应用中是不可接受的。此外,这些方法通常计算量大,难以在资源受限的边缘设备上部署。
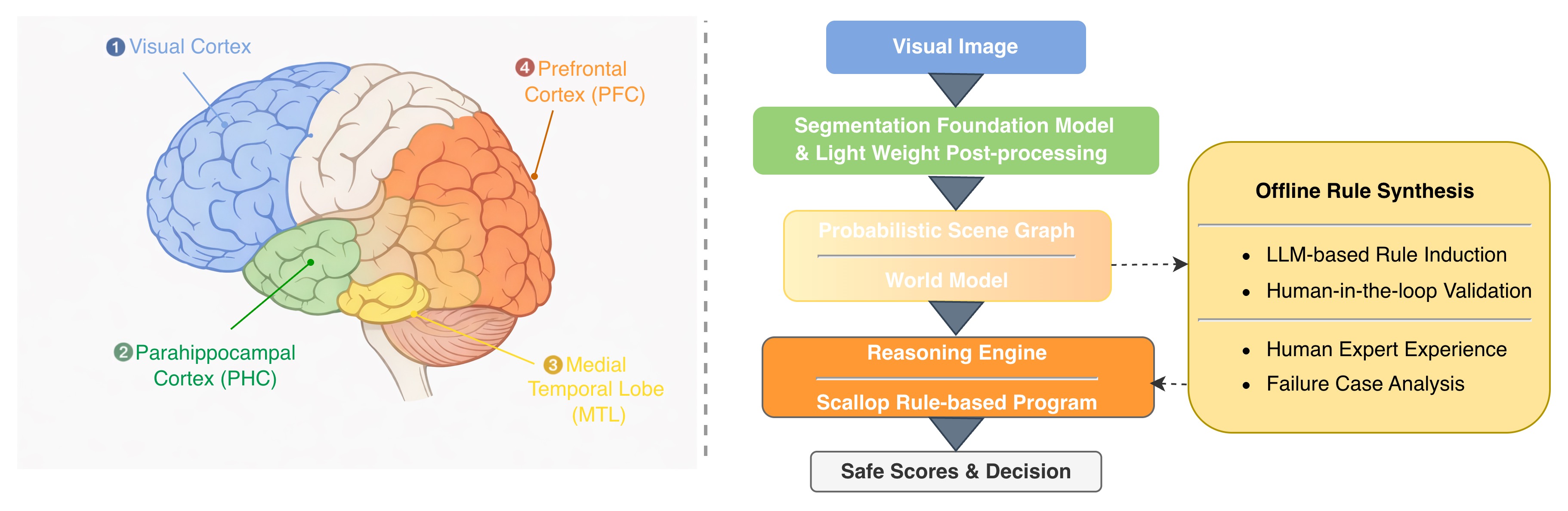
核心思路:NeuroSymLand的核心思路是将复杂的着陆点评估任务分解为两个模块化的部分:感知驱动的世界建模和基于逻辑的安全推理。通过显式地构建场景的语义表示,并使用符号规则进行推理,可以提高系统的可解释性和鲁棒性。这种方法允许系统在面对新的环境时,能够根据预定义的规则进行推理,而不是依赖于大量的数据进行学习。
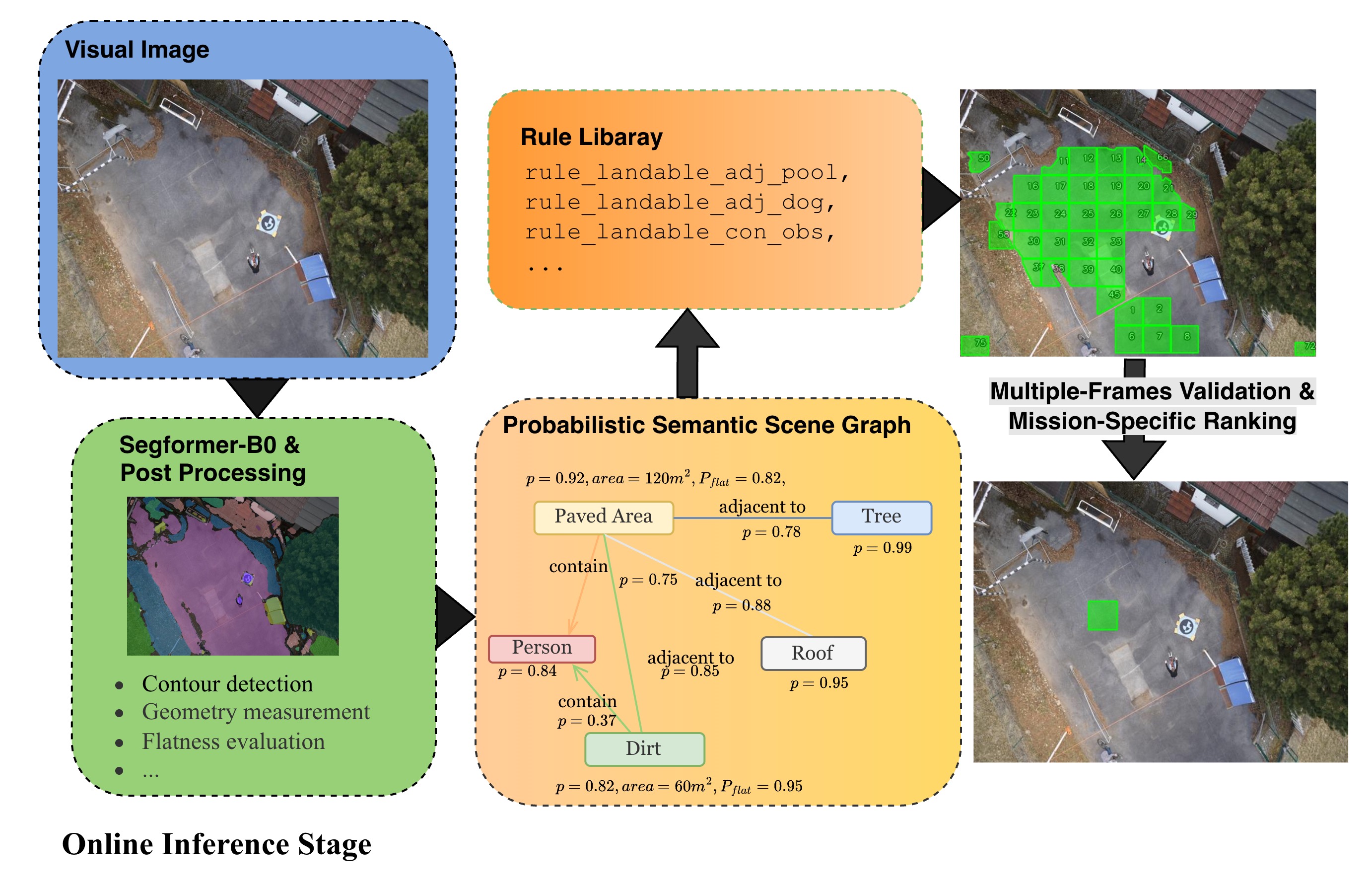
技术框架:NeuroSymLand框架包含以下几个主要模块:1) 轻量级分割模型:用于从图像中提取语义信息,例如识别地面、障碍物等。2) 概率语义场景图构建:将分割结果转换为场景图,编码对象、属性和空间关系,并引入概率表示不确定性。3) 符号安全规则:使用大型语言模型生成,并由人工进行精炼,定义了着陆点的安全约束。4) 白盒推理引擎:在场景图上执行安全规则,评估着陆点的安全性,并生成人类可读的解释。
关键创新:NeuroSymLand的关键创新在于将神经方法和符号方法相结合,利用神经模型进行感知,利用符号规则进行推理。这种结合使得系统既具有感知能力,又具有推理能力,从而提高了系统的准确性、可解释性和鲁棒性。与纯粹的基于学习的方法相比,NeuroSymLand不需要大量的数据进行训练,并且可以更容易地进行调试和验证。
关键设计:在分割模型方面,采用了轻量级的设计,以适应边缘设备的计算能力。在场景图构建方面,使用了概率表示来处理感知的不确定性。在安全规则方面,使用了大型语言模型进行自动生成,并由人工进行精炼,以保证规则的正确性和完整性。推理引擎采用了白盒设计,可以清晰地展示推理过程,方便用户理解和验证。
🖼️ 关键图片

📊 实验亮点
NeuroSymLand在72个模拟和硬件在环着陆场景中进行了评估,成功评估了61个场景,显著优于四个竞争基线(37到57个成功案例)。定性分析表明,NeuroSymLand具有卓越的可解释性和透明推理能力,并且部署在边缘设备上的开销可以忽略不计。这些结果表明,NeuroSymLand是一种有效的无人机安全着陆点评估方法。
🎯 应用场景
NeuroSymLand可应用于各种需要安全自主着陆的无人机应用场景,例如:包裹递送、基础设施巡检、灾害救援、环境监测等。该框架的可解释性和鲁棒性使其在安全攸关的应用中具有重要价值。未来,该方法可以扩展到其他移动机器人系统,例如自动驾驶汽车和移动服务机器人。
📄 摘要(原文)
Reliable assessment of safe landing sites in unstructured environments is essential for deploying Unmanned Aerial Vehicles (UAVs) in real-world applications such as delivery, inspection, and surveillance. Existing learning-based approaches often degrade under covariate shift and offer limited transparency, making their decisions difficult to interpret and validate on resource-constrained platforms. We present NeuroSymLand, a neuro-symbolic framework for marker-free UAV landing site safety assessment that explicitly separates perception-driven world modeling from logic-based safety reasoning. A lightweight segmentation model incrementally constructs a probabilistic semantic scene graph encoding objects, attributes, and spatial relations. Symbolic safety rules, synthesized offline via large language models with human-in-the-loop refinement, are executed directly over this world model at runtime to perform white-box reasoning, producing ranked landing candidates with human-readable explanations of the underlying safety constraints. Across 72 simulated and hardware-in-the-loop landing scenarios, NeuroSymLand achieves 61 successful assessments, outperforming four competitive baselines, which achieve between 37 and 57 successes. Qualitative analysis highlights its superior interpretability and transparent reasoning, while deployment incurs negligible edge overhead. Our results suggest that combining explicit world modeling with symbolic reasoning can support accurate, interpretable, and edge-deployable safety assessment in mobile systems, as demonstrated through UAV landing site assessment.