Estimation of Minimum Stride Frequency for the Frontal Plane Stability of Bipedal Systems
作者: Harsha Karunanayaka, Siavash Rezazadeh
分类: cs.RO
发布日期: 2025-10-24
💡 一句话要点
提出一种预测二足系统额状面稳定所需最小步频的方法,用于优化步态控制。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 二足机器人 步态控制 额状面稳定性 最小步频 前馈控制
📋 核心要点
- 现有二足机器人步态控制方法在额状面稳定性方面存在不足,尤其是在理解关键参数对稳定性的影响方面。
- 该论文提出了一种预测维持二足系统额状面稳定所需的最小步频的方法,利用前馈稳定减少控制工作量。
- 通过分析模型参数和固有频率对最小步频的影响,并将预测值与随机模型进行比较,验证了该方法的有效性。
📝 摘要(中文)
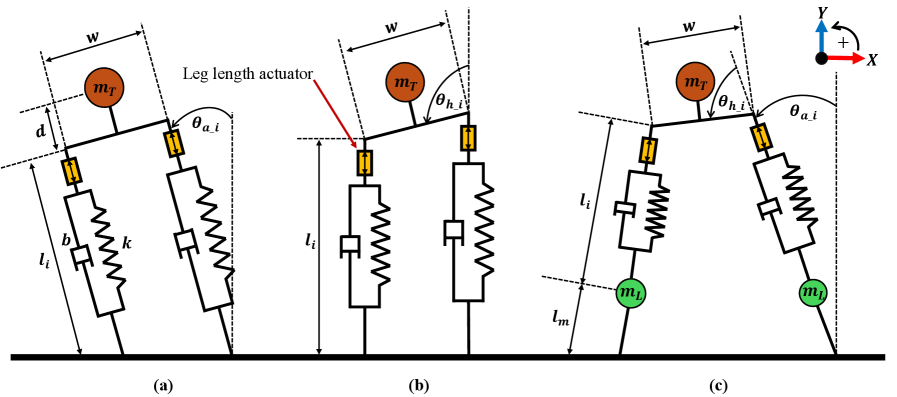
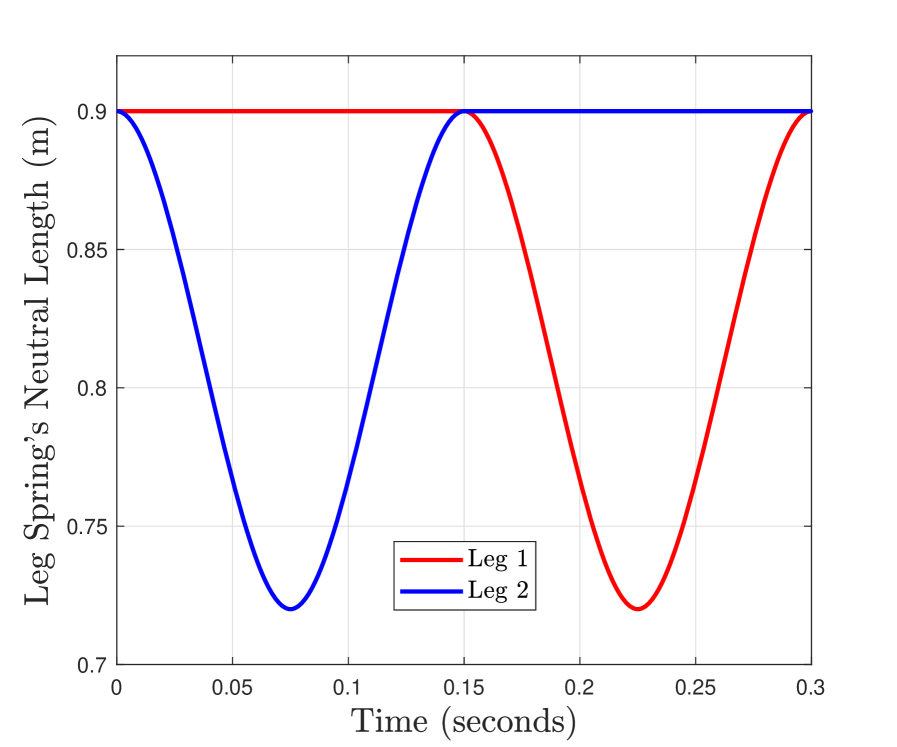
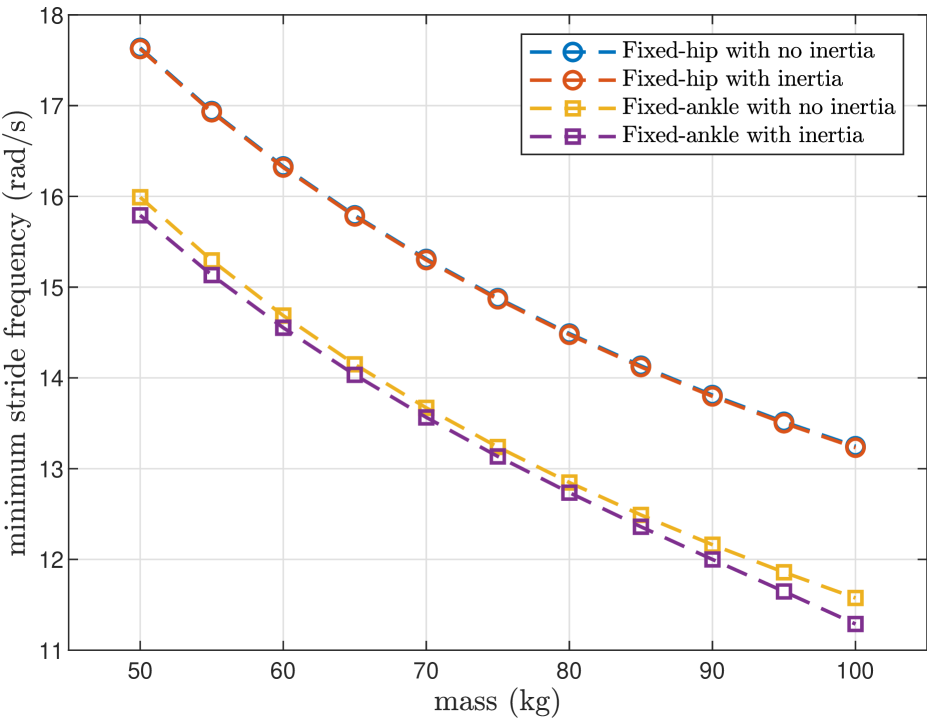
二足系统在额状面上的稳定性受髋部偏移的影响。通过前馈方式伸缩腿部来调整步幅时间,可以在没有反馈控制的情况下实现稳定的振荡。这种前馈稳定方法可以减少控制工作量和能量消耗,并提高运动的鲁棒性。然而,对于质量、刚度、腿长和髋部宽度等关键参数如何影响稳定性以及维持稳定性所需的最小步频,人们的理解有限。本研究旨在通过分析单个模型参数和系统的固有频率如何影响维持稳定循环所需的最小步频来弥补这些差距。我们提出了一种预测最小步频的方法,并将预测的步频与随机生成的模型的实际值进行比较。这项研究的结果有助于更好地理解额状面稳定性机制,以及如何利用前馈稳定来减少控制工作量。
🔬 方法详解
问题定义:论文旨在解决二足机器人在额状面上稳定行走时,如何确定最小步频的问题。现有方法缺乏对关键参数(如质量、刚度、腿长、髋部宽度)与最小步频之间关系的深入理解,导致难以有效利用前馈稳定来优化步态控制。
核心思路:论文的核心思路是通过分析模型参数和系统的固有频率,建立最小步频与这些参数之间的关系模型。通过预测最小步频,可以更好地利用前馈稳定,从而减少控制工作量和能量消耗,提高运动的鲁棒性。
技术框架:论文首先建立二足机器人的动力学模型,然后分析该模型的固有频率。接着,基于模型参数和固有频率,推导出最小步频的预测公式。最后,通过随机生成不同的模型参数,将预测的最小步频与实际的稳定步频进行比较,验证预测方法的有效性。
关键创新:论文的关键创新在于提出了一种基于模型参数和固有频率预测最小步频的方法。该方法能够定量地分析关键参数对稳定性的影响,为二足机器人步态控制的优化提供了理论依据。与现有方法相比,该方法更加注重对系统内在特性的分析,而非仅仅依赖反馈控制。
关键设计:论文的关键设计包括:1)建立准确的二足机器人动力学模型;2)推导出最小步频的预测公式,该公式需要考虑质量、刚度、腿长、髋部宽度等参数;3)设计合理的实验方案,通过随机生成模型参数,验证预测方法的准确性。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了所提出的最小步频预测方法的有效性。通过随机生成不同的模型参数,并将预测的最小步频与实际的稳定步频进行比较,结果表明预测值与实际值具有较高的一致性。这表明该方法能够准确地预测维持二足系统额状面稳定所需的最小步频,为步态控制优化提供了可靠的依据。
🎯 应用场景
该研究成果可应用于二足机器人的步态控制优化,尤其是在复杂地形或存在外部干扰的情况下。通过预测最小步频,可以设计更节能、更鲁棒的步态,提高机器人的运动性能。此外,该研究还可以为假肢和外骨骼的设计提供理论指导,帮助开发更自然、更舒适的辅助设备。
📄 摘要(原文)
Stability of bipedal systems in frontal plane is affected by the hip offset, to the extent that adjusting stride time using feedforward retraction and extension of the legs can lead to stable oscillations without feedback control. This feedforward stabilization can be leveraged to reduce the control effort and energy expenditure and increase the locomotion robustness. However, there is limited understanding of how key parameters, such as mass, stiffness, leg length, and hip width, affect stability and the minimum stride frequency needed to maintain it. This study aims to address these gaps through analyzing how individual model parameters and the system's natural frequency influence the minimum stride frequency required to maintain a stable cycle. We propose a method to predict the minimum stride frequency, and compare the predicted stride frequencies with actual values for randomly generated models. The findings of this work provide a better understanding of the frontal plane stability mechanisms and how feedforward stabilization can be leveraged to reduce the control effort.