Enhancing Tactile-based Reinforcement Learning for Robotic Control
作者: Elle Miller, Trevor McInroe, David Abel, Oisin Mac Aodha, Sethu Vijayakumar
分类: cs.RO, cs.LG
发布日期: 2025-10-24
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于触觉自监督学习的强化学习方法,提升机器人操作灵巧性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 触觉感知 强化学习 自监督学习 机器人操作 灵巧性 稀疏触觉信号 对比学习 机器人触觉奥林匹克
📋 核心要点
- 现有机器人操作依赖视觉,忽略了触觉在复杂交互中的重要性,导致对环境变化和本体感受误差的鲁棒性不足。
- 论文提出一种基于自监督学习的强化学习方法,利用稀疏二元触觉信号,提升机器人对接触任务的感知和控制能力。
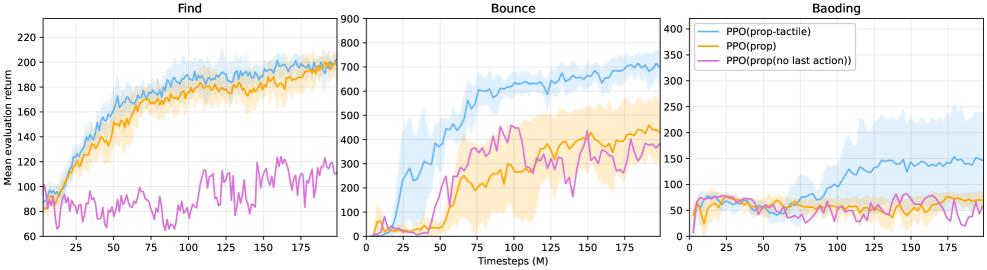
- 实验表明,该方法在弹球和保定球旋转等任务中表现出超人的灵巧性,并且解耦SSL记忆可以进一步提升性能。
📝 摘要(中文)
为了使机器人能够安全可靠地进行真实世界的操作,需要智能体超越视觉,整合触觉感知,以克服感觉缺陷和对理想化状态信息的依赖。尽管触觉感知具有潜力,但其在强化学习(RL)中的效果并不稳定。本文通过开发自监督学习(SSL)方法来更有效地利用触觉观测来解决这个问题,重点关注本体感受和稀疏二元接触的可扩展设置。经验表明,稀疏二元触觉信号对于灵巧性至关重要,特别是对于本体感受控制误差无法注册的交互,例如解耦的机器人-物体运动。智能体在复杂的接触任务(弹球和保定球旋转)中实现了超人的灵巧性。此外,发现将SSL记忆与在线策略记忆分离可以提高性能。发布了机器人触觉奥林匹克(RoTO)基准,以标准化和促进未来基于触觉操作的研究。
🔬 方法详解
问题定义:现有机器人强化学习方法过度依赖视觉信息,忽略了触觉在复杂操作中的重要作用。尤其是在本体感受器无法精确感知的细微交互(如物体滑动、轻微接触)中,视觉信息的不足会导致控制策略失效。因此,如何有效利用触觉信息,提升机器人操作的鲁棒性和灵巧性,是本文要解决的核心问题。
核心思路:论文的核心思路是利用自监督学习(SSL)从稀疏的二元触觉信号中提取有用的表征,并将其融入到强化学习框架中。通过自监督学习,机器人可以学习到触觉信号与自身动作之间的关系,从而更好地理解环境并做出相应的控制决策。这种方法旨在克服触觉信号的稀疏性和噪声,提高触觉信息在强化学习中的利用率。
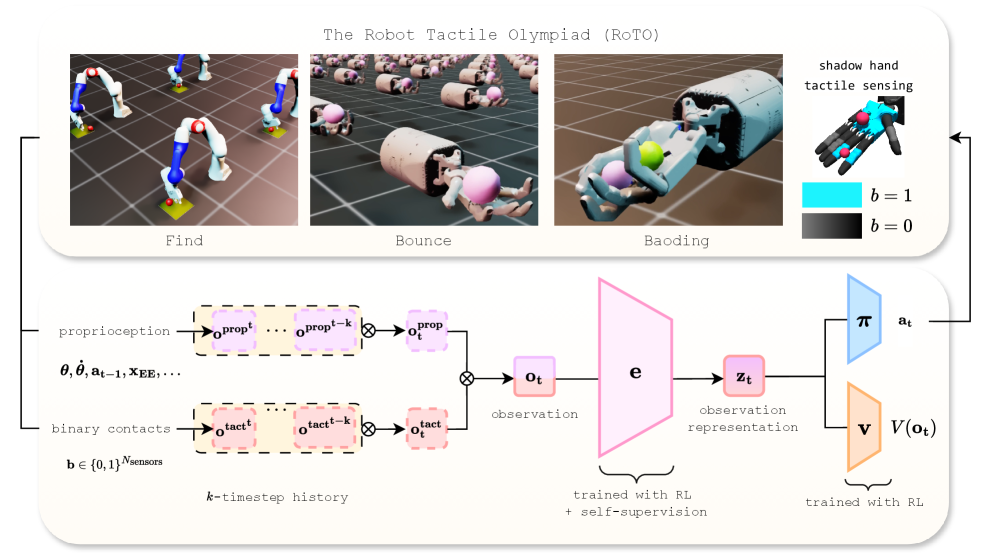
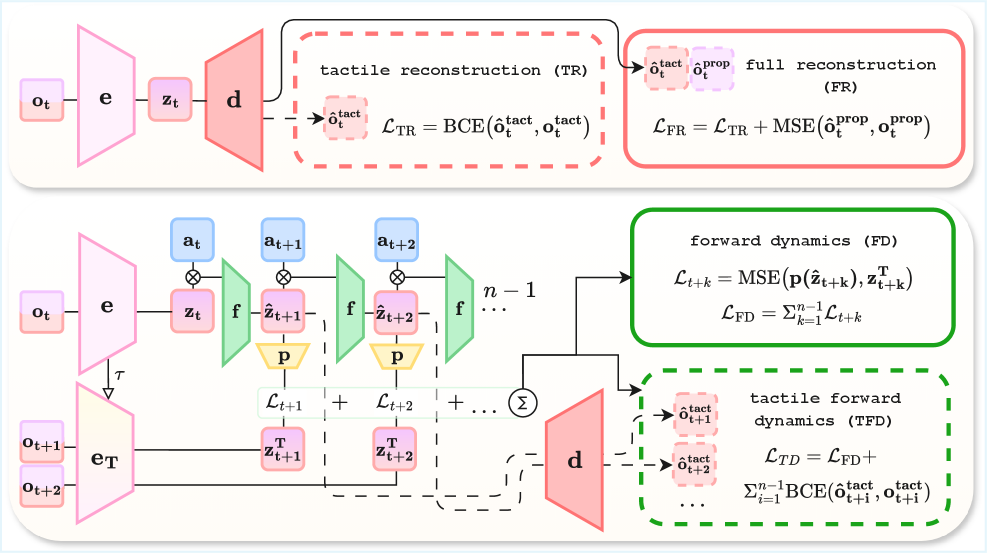
技术框架:整体框架包含三个主要部分:1)触觉数据采集:使用机器人手臂上的触觉传感器采集稀疏的二元触觉信号。2)自监督学习:使用对比学习等方法,从触觉数据中学习触觉表征。具体来说,模型学习预测当前触觉状态与未来触觉状态之间的关系,或者区分真实的触觉序列和随机生成的触觉序列。3)强化学习:将学习到的触觉表征作为强化学习智能体的输入,训练智能体完成特定的操作任务。论文还探索了将SSL记忆与在线策略记忆解耦的方法,以进一步提高性能。
关键创新:论文的关键创新在于:1)强调了稀疏二元触觉信号在复杂操作中的重要性,并证明了其在本体感受器无法感知的交互中的作用。2)提出了一种基于自监督学习的触觉表征学习方法,能够有效地从稀疏触觉信号中提取有用的信息。3)探索了将SSL记忆与在线策略记忆解耦的方法,以提高强化学习的效率和性能。4)发布了Robot Tactile Olympiad (RoTO) 基准,以促进触觉操作领域的研究。
关键设计:在自监督学习方面,论文采用了对比学习的方法,通过最大化相似触觉状态之间的相似性,最小化不相似触觉状态之间的相似性来学习触觉表征。具体来说,可以使用InfoNCE损失函数来训练模型。在强化学习方面,论文使用了常见的策略梯度算法,如PPO。关键参数包括自监督学习的batch size、学习率,以及强化学习的折扣因子、探索率等。网络结构方面,可以使用卷积神经网络(CNN)来处理触觉数据,并使用循环神经网络(RNN)来处理时间序列数据。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在弹球和保定球旋转等复杂接触任务中取得了显著的性能提升,甚至达到了超人的水平。与传统的基于视觉的强化学习方法相比,该方法能够更好地处理环境变化和本体感受误差,表现出更强的鲁棒性和灵巧性。此外,将SSL记忆与在线策略记忆解耦可以进一步提高性能,表明了自监督学习在强化学习中的潜力。
🎯 应用场景
该研究成果可应用于各种需要精细操作的机器人任务,例如:医疗手术机器人、装配线上的工业机器人、家庭服务机器人等。通过提升机器人对触觉信息的感知和利用能力,可以使其在复杂环境中更加安全、可靠地完成任务,从而提高生产效率和服务质量。未来,该技术有望推动机器人智能化的发展,使其能够更好地适应各种真实世界的应用场景。
📄 摘要(原文)
Achieving safe, reliable real-world robotic manipulation requires agents to evolve beyond vision and incorporate tactile sensing to overcome sensory deficits and reliance on idealised state information. Despite its potential, the efficacy of tactile sensing in reinforcement learning (RL) remains inconsistent. We address this by developing self-supervised learning (SSL) methodologies to more effectively harness tactile observations, focusing on a scalable setup of proprioception and sparse binary contacts. We empirically demonstrate that sparse binary tactile signals are critical for dexterity, particularly for interactions that proprioceptive control errors do not register, such as decoupled robot-object motions. Our agents achieve superhuman dexterity in complex contact tasks (ball bouncing and Baoding ball rotation). Furthermore, we find that decoupling the SSL memory from the on-policy memory can improve performance. We release the Robot Tactile Olympiad (RoTO) benchmark to standardise and promote future research in tactile-based manipulation. Project page: https://elle-miller.github.io/tactile_rl