Load-bearing Assessment for Safe Locomotion of Quadruped Robots on Collapsing Terrain
作者: Vivian S. Medeiros, Giovanni B. Dessy, Thiago Boaventura, Marcelo Becker, Claudio Semini, Victor Barasuol
分类: cs.RO
发布日期: 2025-10-24
💡 一句话要点
提出一种基于力感知的四足机器人可塌陷地形安全导航框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 可塌陷地形 运动规划 模型预测控制 地形探测
📋 核心要点
- 四足机器人在搜索救援或行星探索等场景中常遇到可塌陷地形,传统方法依赖外部传感器或地图,成本高且易受环境影响。
- 该论文提出一种基于关节测量的地形稳定性评估方法,无需额外硬件,结合模型预测控制和状态机实现安全导航。
- 实验结果表明,该框架能够在可塌陷地形和岩石地形上保持稳定,验证了其在复杂环境下安全运动的有效性。
📝 摘要(中文)
本文提出了一种鲁棒的四足机器人运动框架,用于在不稳定的可塌陷地形上安全导航。该框架集成了地形探测、承载能力分析、运动规划和控制策略。与依赖专用传感器或外部地形测绘的传统方法不同,我们的方法利用关节测量来评估地形稳定性,无需硬件修改。模型预测控制(MPC)系统优化机器人运动,平衡稳定性和探测约束,而状态机协调地形探测动作,使机器人能够检测可塌陷区域并动态调整其落脚点。在定制的可塌陷平台和岩石地形上的实验结果表明,该框架能够在保持稳定性和优先考虑安全性的同时,穿越可塌陷地形。
🔬 方法详解
问题定义:四足机器人在可塌陷地形上安全运动是一个挑战。现有方法通常依赖于昂贵的外部传感器(如激光雷达或深度相机)来构建地形地图,或者需要预先进行地形分析。这些方法成本高昂,且在环境光照变化或遮挡情况下表现不佳。此外,这些方法通常假设地形是静态的,无法处理动态变化的可塌陷地形。
核心思路:本文的核心思路是利用四足机器人自身的关节测量数据来评估地形的承载能力,从而避免使用外部传感器。通过分析腿部与地面的接触力,可以推断出地形的稳定性和潜在的可塌陷区域。结合模型预测控制(MPC),机器人可以动态调整其运动轨迹和落脚点,以最大限度地提高稳定性和安全性。
技术框架:该框架包含以下主要模块:1) 地形探测:利用关节测量数据估计地形的承载能力。2) 承载能力分析:基于地形探测结果,识别潜在的可塌陷区域。3) 运动规划:使用模型预测控制(MPC)优化机器人运动轨迹,同时考虑稳定性和探测约束。4) 状态机:协调地形探测动作,并根据地形反馈动态调整运动策略。整体流程是,机器人首先进行地形探测,然后进行承载能力分析,根据分析结果使用MPC进行运动规划,最后通过状态机控制机器人的运动。
关键创新:该论文的关键创新在于:1) 无需外部传感器的地形评估:利用机器人自身的关节测量数据进行地形评估,降低了成本和复杂性。2) 集成的运动规划和控制框架:将地形探测、承载能力分析、运动规划和控制集成到一个统一的框架中,实现了更鲁棒和安全的运动。3) 动态调整落脚点:能够根据地形反馈动态调整落脚点,避免踩入可塌陷区域。
关键设计:1) 承载能力评估:使用腿部关节力矩和位置信息来估计地面的支撑力,并判断该位置是否稳定。具体方法未知,论文可能使用了某种力学模型或机器学习方法。2) MPC目标函数:MPC的目标函数包含多个项,包括跟踪期望轨迹、保持平衡、最小化关节力矩和避免踩入可塌陷区域。3) 状态机:状态机用于协调不同的运动模式,例如探测模式、行走模式和避障模式。状态机的具体状态转移条件未知。
🖼️ 关键图片

📊 实验亮点
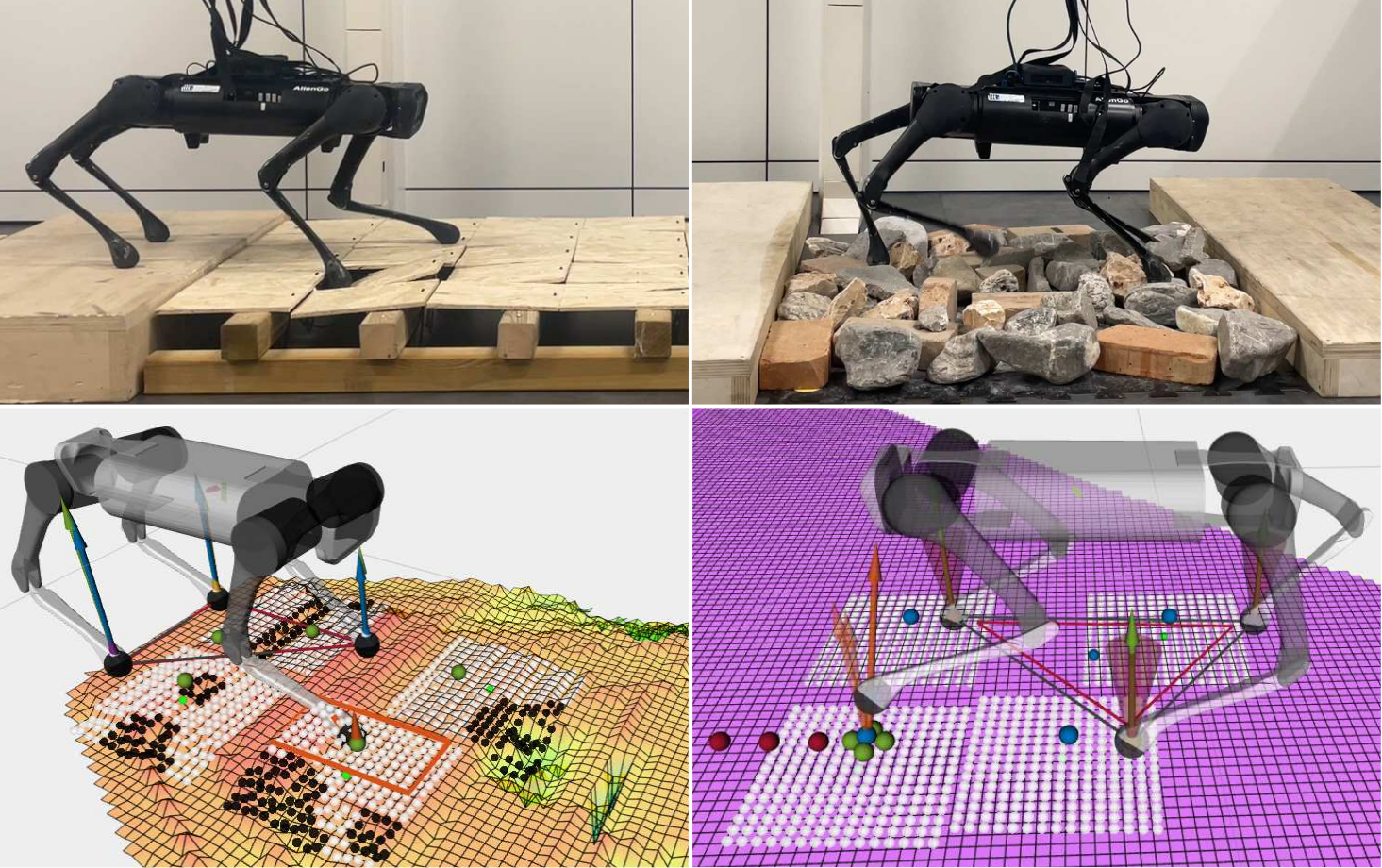
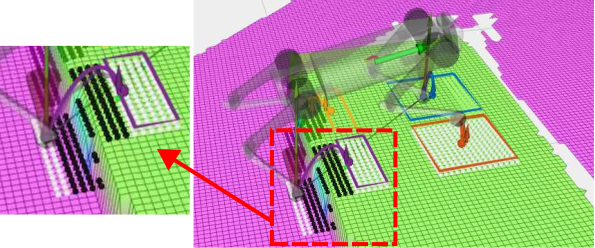
实验结果表明,该框架能够在定制的可塌陷平台和岩石地形上成功导航。在可塌陷平台上,机器人能够识别并避开可塌陷区域,保持稳定运动。在岩石地形上,机器人能够根据地形反馈动态调整落脚点,克服障碍物。具体性能数据未知,但实验结果表明该框架具有良好的鲁棒性和适应性。
🎯 应用场景
该研究成果可应用于搜索救援、行星探索、灾后重建等领域。在这些场景中,四足机器人需要在复杂、不稳定的地形上执行任务,例如搜寻幸存者、勘探资源或运送物资。该框架能够提高四足机器人在这些环境中的安全性和可靠性,扩展其应用范围。
📄 摘要(原文)
Collapsing terrains, often present in search and rescue missions or planetary exploration, pose significant challenges for quadruped robots. This paper introduces a robust locomotion framework for safe navigation over unstable surfaces by integrating terrain probing, load-bearing analysis, motion planning, and control strategies. Unlike traditional methods that rely on specialized sensors or external terrain mapping alone, our approach leverages joint measurements to assess terrain stability without hardware modifications. A Model Predictive Control (MPC) system optimizes robot motion, balancing stability and probing constraints, while a state machine coordinates terrain probing actions, enabling the robot to detect collapsible regions and dynamically adjust its footholds. Experimental results on custom-made collapsing platforms and rocky terrains demonstrate the framework's ability to traverse collapsing terrain while maintaining stability and prioritizing safety.