The Reality Gap in Robotics: Challenges, Solutions, and Best Practices
作者: Elie Aljalbout, Jiaxu Xing, Angel Romero, Iretiayo Akinola, Caelan Reed Garrett, Eric Heiden, Abhishek Gupta, Tucker Hermans, Yashraj Narang, Dieter Fox, Davide Scaramuzza, Fabio Ramos
分类: cs.RO, cs.AI, cs.LG, stat.ML
发布日期: 2025-10-23
备注: Accepted for Publication as part of the Annual Review of Control, Robotics, and Autonomous Systems 2026
💡 一句话要点
综述机器人领域现实差距问题,分析原因、解决方案与最佳实践
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人 现实差距 Sim-to-Real 领域随机化 迁移学习 仿真 机器人学习 综述
📋 核心要点
- 现有机器人系统在仿真环境中表现良好,但由于现实差距,难以直接迁移到真实世界。
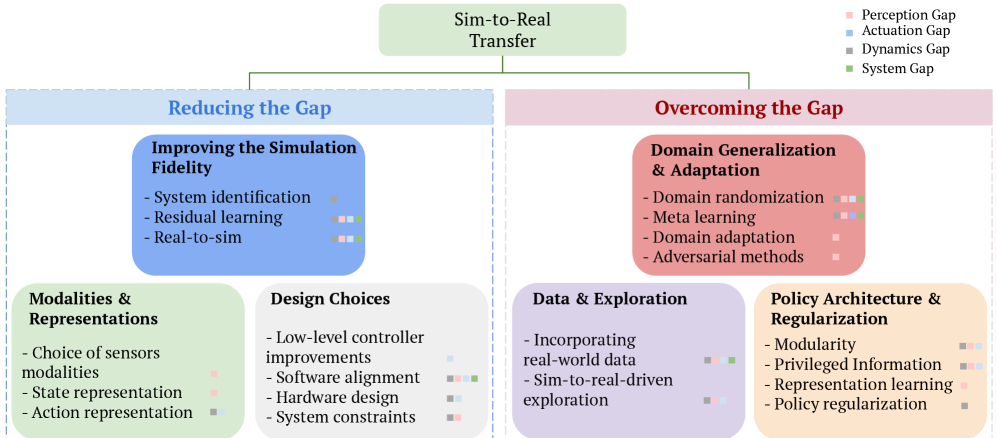
- 论文综述了弥合现实差距的各种方法,包括领域随机化、real-to-sim迁移等,并分析了它们的优缺点。
- 论文总结了现实差距的原因和评估指标,为未来研究提供了指导,并强调了持续存在的挑战。
📝 摘要(中文)
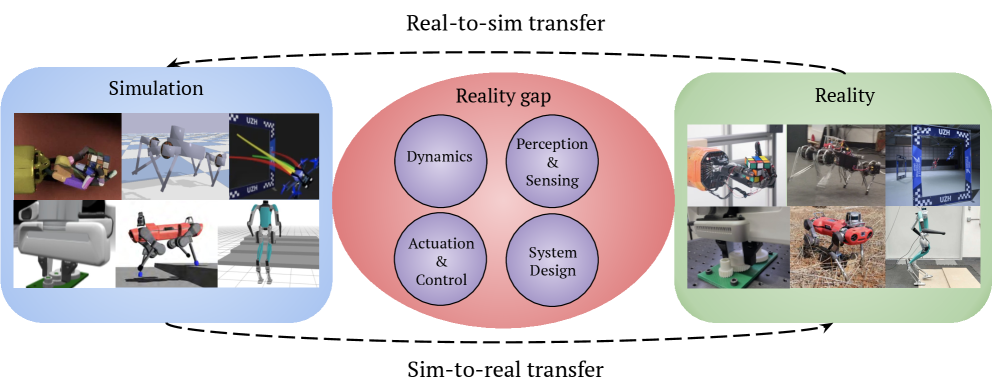
机器学习极大地推动了导航、运动和操作等各个机器人领域的发展。这些成就很大程度上得益于仿真技术,它作为在真实环境中部署机器人系统之前进行训练和测试的关键工具。然而,仿真包含抽象和近似,不可避免地导致模拟环境和真实环境之间存在差异,即现实差距。这些差异严重阻碍了系统从仿真到现实世界的成功迁移。弥合这一差距仍然是机器人领域最紧迫的挑战之一。近年来,sim-to-real迁移方面的进展在运动、导航和操作等多个平台上都取得了可喜的成果。通过利用诸如领域随机化、real-to-sim迁移、状态和动作抽象以及sim-real协同训练等技术,许多工作已经克服了现实差距。然而,挑战依然存在,需要更深入地了解现实差距的根本原因和解决方案。本综述全面概述了sim-to-real领域,重点介绍了现实差距和sim-to-real迁移的原因、解决方案和评估指标。
🔬 方法详解
问题定义:现实差距是指机器人系统在仿真环境中训练后,由于仿真环境与真实环境的差异,导致在真实环境中性能下降的问题。现有方法往往难以充分模拟真实世界的复杂性和不确定性,例如光照变化、摩擦系数、传感器噪声等,导致模型在仿真环境中学习到的策略无法很好地泛化到真实世界。
核心思路:论文的核心思路是对现有的sim-to-real迁移方法进行系统性的梳理和分析,从根本原因、解决方案和评估指标三个方面对现实差距进行深入探讨。通过总结现有方法的优缺点,为未来的研究方向提供指导,并促进更有效的sim-to-real迁移技术的发展。
技术框架:该论文属于综述性质,并没有提出新的技术框架。它主要通过以下几个方面来组织内容:1) 现实差距的根本原因分析,包括仿真环境的简化、物理引擎的局限性、传感器模型的误差等;2) 现有sim-to-real迁移方法的分类和比较,例如领域随机化、real-to-sim迁移、状态和动作抽象、sim-real协同训练等;3) 评估sim-to-real迁移效果的指标,例如成功率、效率、鲁棒性等;4) 未来研究方向的展望,例如更逼真的仿真环境、更有效的领域自适应方法、更鲁棒的控制策略等。
关键创新:该论文的主要创新在于对sim-to-real领域进行了全面的综述,并对现实差距的根本原因和解决方案进行了深入的分析。它并没有提出新的算法或模型,而是通过总结和归纳现有方法,为研究人员提供了一个清晰的sim-to-real迁移路线图。
关键设计:该论文的关键设计在于其结构化的组织方式,它将sim-to-real迁移问题分解为三个关键方面:原因、解决方案和评估。通过对每个方面进行深入的分析,论文为读者提供了一个全面的理解,并为未来的研究方向提供了指导。
🖼️ 关键图片
📊 实验亮点
该综述全面分析了sim-to-real迁移领域,总结了领域随机化、real-to-sim迁移等多种方法在解决现实差距方面的应用。它强调了理解现实差距根本原因的重要性,并为未来研究提供了有价值的指导,促进了更有效的机器人系统开发。
🎯 应用场景
该研究对机器人领域的广泛应用具有重要意义,包括工业自动化、服务机器人、自动驾驶等。通过有效弥合现实差距,可以降低机器人系统的开发成本和部署时间,提高其在真实环境中的性能和可靠性,从而加速机器人技术的商业化进程。
📄 摘要(原文)
Machine learning has facilitated significant advancements across various robotics domains, including navigation, locomotion, and manipulation. Many such achievements have been driven by the extensive use of simulation as a critical tool for training and testing robotic systems prior to their deployment in real-world environments. However, simulations consist of abstractions and approximations that inevitably introduce discrepancies between simulated and real environments, known as the reality gap. These discrepancies significantly hinder the successful transfer of systems from simulation to the real world. Closing this gap remains one of the most pressing challenges in robotics. Recent advances in sim-to-real transfer have demonstrated promising results across various platforms, including locomotion, navigation, and manipulation. By leveraging techniques such as domain randomization, real-to-sim transfer, state and action abstractions, and sim-real co-training, many works have overcome the reality gap. However, challenges persist, and a deeper understanding of the reality gap's root causes and solutions is necessary. In this survey, we present a comprehensive overview of the sim-to-real landscape, highlighting the causes, solutions, and evaluation metrics for the reality gap and sim-to-real transfer.