Push Anything: Single- and Multi-Object Pushing From First Sight with Contact-Implicit MPC
作者: Hien Bui, Yufeiyang Gao, Haoran Yang, Eric Cui, Siddhant Mody, Brian Acosta, Thomas Stephen Felix, Bibit Bianchini, Michael Posa
分类: cs.RO
发布日期: 2025-10-22
备注: Hien Bui, Yufeiyang Gao, and Haoran Yang contributed equally to this work
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出C3+算法,通过接触隐式MPC实现对多种物体的单/多目标精准推移操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非抓取操作 接触隐式MPC 模型预测控制 多物体操作 机器人控制
📋 核心要点
- 现有非抓取操作方法难以处理物体属性未知和复杂接触交互,尤其是在多物体场景下。
- 提出C3+算法,增强接触隐式模型预测控制,实现对多种几何形状物体的精准推移。
- 实验结果表明,C3+在硬件上对33个物体实现了98%的成功率,显著提升了实时性。
📝 摘要(中文)
在机器人领域,对各种物体进行非抓取操作仍然是一个核心挑战,这主要是由于物体物理属性的未知性和富接触交互的复杂性所致。接触隐式模型预测控制(CI-MPC)通过将接触推理直接嵌入到轨迹优化中,在高效且稳健地解决该问题方面展现了潜力,但之前的演示仅限于精心策划的示例。本文通过精确的平面推移任务,展示了CI-MPC在各种物体几何形状上的更广泛能力,包括多物体领域。这些场景需要对大量的物体间和物体-环境接触进行推理,以策略性地操纵和整理环境,这对之前的CI-MPC方法来说是难以处理的。为此,我们引入了Consensus Complementarity Control Plus (C3+),这是一种增强的CI-MPC算法,集成到一个完整的流程中,包括物体扫描、网格重建和硬件执行。与之前的C3相比,C3+实现了更快的求解时间,即使在多物体推移任务中也能实现实时性能。在硬件上,我们的系统在33个物体上实现了98%的总体成功率,并在严格的公差范围内达到了姿态目标。对于1、2、3和4个物体的任务,平均达到目标的时间分别约为0.5、1.6、3.2和5.3分钟。
🔬 方法详解
问题定义:论文旨在解决机器人非抓取操作中,由于物体物理属性未知和接触交互复杂性导致的,难以对多种物体进行精确推移操作的问题,尤其是在多物体场景下。现有CI-MPC方法虽然在一定程度上解决了这个问题,但计算效率较低,难以处理复杂的多物体交互。
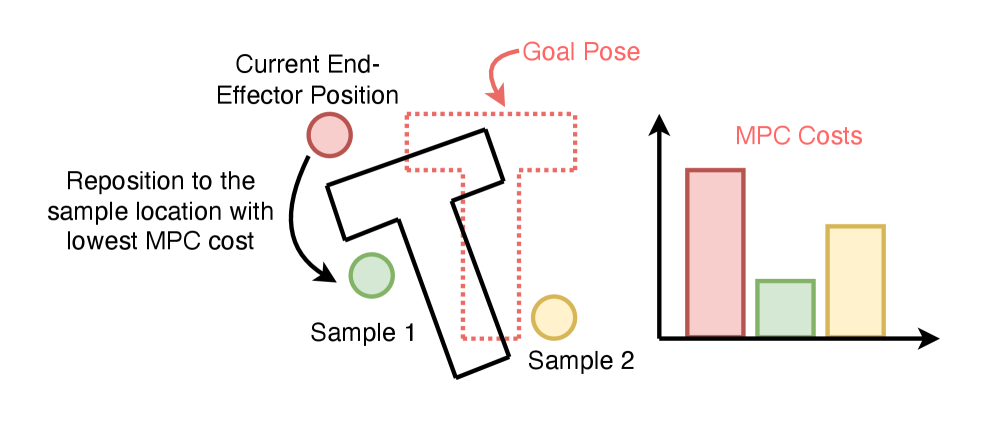
核心思路:论文的核心思路是通过改进CI-MPC算法,使其能够更高效地处理多物体之间的接触和摩擦力,从而实现对多个物体的精确推移操作。通过优化算法,降低计算复杂度,提高实时性,使得机器人能够在实际环境中进行复杂的操作。
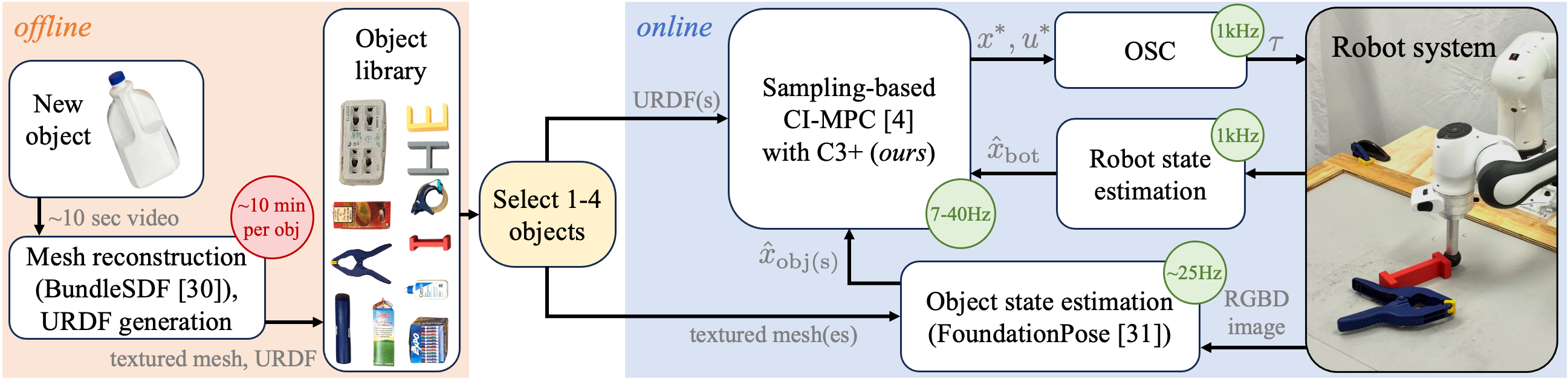
技术框架:整体框架包括三个主要阶段:1) 物体扫描和网格重建,用于获取物体的几何信息;2) C3+算法,用于生成推移轨迹;3) 硬件执行,将生成的轨迹发送给机器人进行实际操作。C3+算法是核心模块,负责在考虑物体间和物体与环境的接触情况下,优化机器人的运动轨迹。
关键创新:最重要的技术创新点是C3+算法,它是对现有C3算法的改进。C3+通过优化互补约束的求解方式,显著降低了计算复杂度,从而提高了算法的实时性。这使得C3+能够处理更复杂的多物体推移任务,而之前的C3算法难以胜任。
关键设计:C3+算法的关键设计在于其对互补约束的处理方式。具体来说,C3+可能采用了更高效的线性求解器或优化算法,以加速互补约束的求解过程。此外,C3+可能还引入了一些启发式策略,以减少搜索空间,提高算法的收敛速度。论文中可能还涉及了对接触模型的参数调整,以提高预测的准确性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,C3+算法在硬件平台上对33种不同的物体实现了98%的成功率,并且在严格的姿态容差范围内达到了目标。对于1、2、3和4个物体的任务,平均达到目标的时间分别约为0.5、1.6、3.2和5.3分钟。与之前的C3算法相比,C3+在计算速度上有了显著提升,使得实时控制成为可能。
🎯 应用场景
该研究成果可应用于自动化仓库中的物体整理、家庭服务机器人中的物品操作、以及工业生产线上的零件装配等领域。通过精确的物体推移,机器人可以更灵活地处理各种任务,提高工作效率和自动化水平,降低人工成本。未来,该技术有望扩展到更复杂的环境和任务中,例如在拥挤或不规则的环境中进行物体操作。
📄 摘要(原文)
Non-prehensile manipulation of diverse objects remains a core challenge in robotics, driven by unknown physical properties and the complexity of contact-rich interactions. Recent advances in contact-implicit model predictive control (CI-MPC), with contact reasoning embedded directly in the trajectory optimization, have shown promise in tackling the task efficiently and robustly, yet demonstrations have been limited to narrowly curated examples. In this work, we showcase the broader capabilities of CI-MPC through precise planar pushing tasks over a wide range of object geometries, including multi-object domains. These scenarios demand reasoning over numerous inter-object and object-environment contacts to strategically manipulate and de-clutter the environment, challenges that were intractable for prior CI-MPC methods. To achieve this, we introduce Consensus Complementarity Control Plus (C3+), an enhanced CI-MPC algorithm integrated into a complete pipeline spanning object scanning, mesh reconstruction, and hardware execution. Compared to its predecessor C3, C3+ achieves substantially faster solve times, enabling real-time performance even in multi-object pushing tasks. On hardware, our system achieves overall 98% success rate across 33 objects, reaching pose goals within tight tolerances. The average time-to-goal is approximately 0.5, 1.6, 3.2, and 5.3 minutes for 1-, 2-, 3-, and 4-object tasks, respectively. Project page: https://dairlab.github.io/push-anything.