TARMAC: A Taxonomy for Robot Manipulation in Chemistry
作者: Kefeng Huang, Jonathon Pipe, Alice E. Martin, Tianyuan Wang, Barnabas A. Franklin, Andy M. Tyrrell, Ian J. S. Fairlamb, Jihong Zhu
分类: cs.RO
发布日期: 2025-10-22
💡 一句话要点
提出TARMAC化学机器人操作分类法,提升化学实验自动化水平。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 化学机器人 实验室自动化 机器人操作 领域特定框架 操作分类
📋 核心要点
- 现有化学实验室自动化系统依赖人工干预,缺乏机器人操作技能的系统性描述。
- TARMAC通过定义和组织化学实验中的核心操作,构建领域特定的机器人操作分类法。
- TARMAC基于教学实验演示和实验验证,可实例化为机器人可执行原语,支持技能重用。
📝 摘要(中文)
化学实验室自动化旨在提高实验的通量、可重复性和安全性,但现有系统仍依赖频繁的人工干预。机器人技术的进步降低了这种依赖,但缺乏对所需技能的结构化表示,自主性仍然局限于特定任务的解决方案,难以推广。目前的实验抽象通常描述协议级别的步骤,而没有指定执行这些步骤所需的机器人动作。这突显了化学实验室机器人操作技能系统性描述的缺失。为了解决这个问题,我们引入了TARMAC——化学机器人操作分类法,这是一个特定领域的框架,定义和组织了实验室实践中所需的核心操作。基于带注释的教学实验室演示和实验验证,TARMAC根据其功能角色和物理执行要求对动作进行分类。除了作为描述性词汇表之外,TARMAC还可以实例化为机器人可执行的原语,并组合成更高级别的宏,从而实现技能重用,并支持可扩展地集成到长时程工作流程中。这些贡献为更灵活和自主的实验室自动化提供了结构化的基础。
🔬 方法详解
问题定义:论文旨在解决化学实验室自动化中,机器人缺乏通用操作技能描述的问题。现有方法通常针对特定任务设计,难以迁移和复用,且实验抽象仅描述协议级别步骤,忽略了机器人执行所需的具体动作,限制了自动化程度。
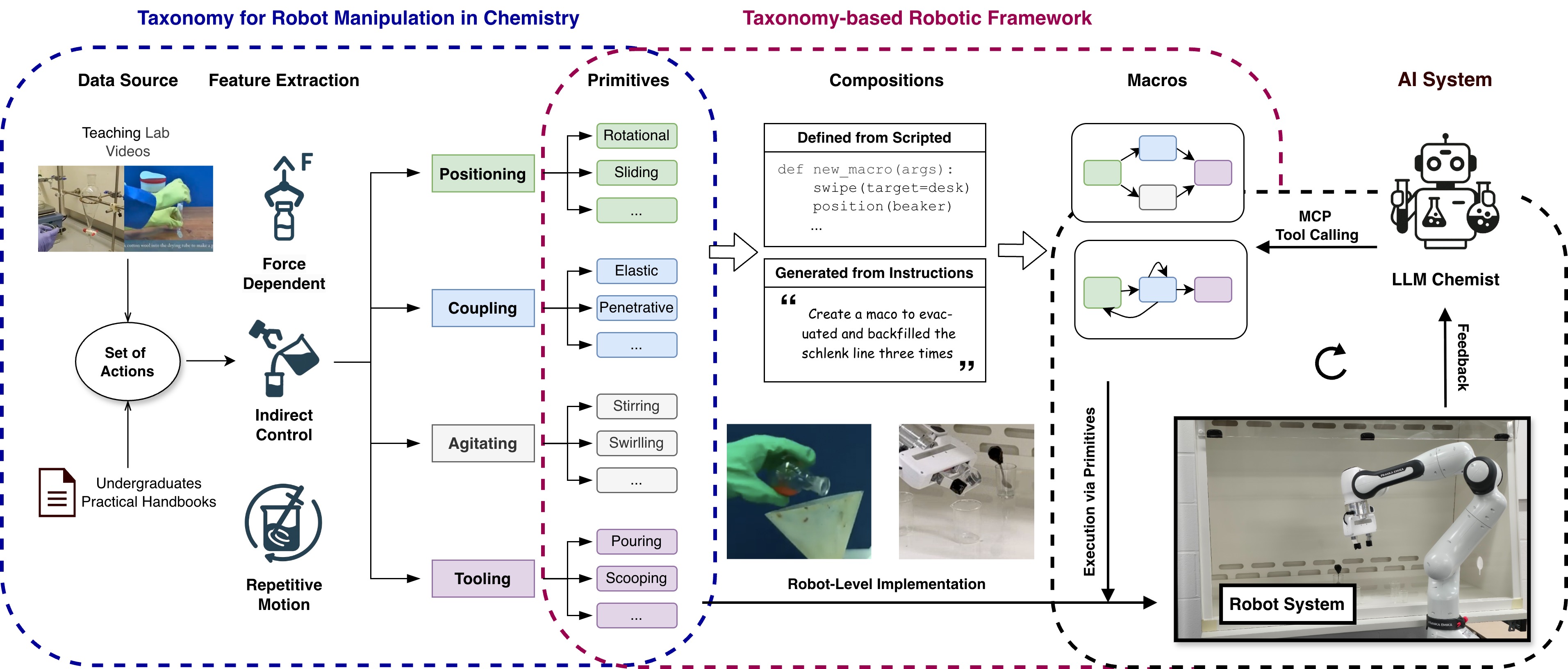
核心思路:论文的核心思路是构建一个领域特定的机器人操作分类法(TARMAC),将化学实验中的机器人操作分解为一系列基本操作单元,并对其进行系统性地组织和分类。通过这种方式,可以为机器人提供一个结构化的操作技能库,从而实现技能的重用和组合,提高机器人的自主性和灵活性。
技术框架:TARMAC框架包含以下几个主要组成部分:1) 操作定义:定义化学实验中常见的机器人操作,例如抓取、放置、倾倒等;2) 操作分类:根据操作的功能角色和物理执行要求,对操作进行分类;3) 操作原语:将操作实例化为机器人可执行的原语,例如运动轨迹、力控制等;4) 操作宏:将多个操作原语组合成更高级别的宏,例如移液、混合等。整体流程是从化学实验任务出发,将其分解为一系列操作,然后根据TARMAC分类法选择相应的操作原语或宏,最后通过机器人执行这些原语或宏来完成任务。
关键创新:TARMAC的关键创新在于其领域特定性和结构化表示。与通用的机器人操作框架不同,TARMAC专门针对化学实验室环境设计,考虑了化学实验的特殊需求和约束。同时,TARMAC采用结构化的分类方法,使得操作的组织和检索更加高效,便于技能的重用和组合。
关键设计:TARMAC的设计关键在于操作的粒度和分类标准。操作的粒度需要足够细,以便能够灵活地组合成各种复杂的任务,但又不能过于细,否则会增加操作的数量和复杂度。分类标准需要能够反映操作的功能角色和物理执行要求,以便能够根据任务的需求选择合适的操作。论文基于带注释的教学实验室演示来确定操作的粒度和分类标准,并通过实验验证了其有效性。具体的参数设置、损失函数、网络结构等技术细节在论文中未详细描述,可能依赖于具体的机器人平台和控制算法。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了TARMAC的有效性,展示了如何使用TARMAC将化学实验任务分解为一系列机器人可执行的操作,并成功地完成了这些任务。虽然论文中没有提供具体的性能数据和对比基线,但实验结果表明TARMAC能够为化学实验室自动化提供一个结构化的基础。
🎯 应用场景
TARMAC可应用于化学实验室自动化、药物发现、材料科学等领域。通过提供结构化的机器人操作技能,TARMAC能够提高实验的通量、可重复性和安全性,降低人工干预的需求。未来,TARMAC可以与其他自动化工具和平台集成,构建更加智能和高效的化学实验室。
📄 摘要(原文)
Chemistry laboratory automation aims to increase throughput, reproducibility, and safety, yet many existing systems still depend on frequent human intervention. Advances in robotics have reduced this dependency, but without a structured representation of the required skills, autonomy remains limited to bespoke, task-specific solutions with little capacity to transfer beyond their initial design. Current experiment abstractions typically describe protocol-level steps without specifying the robotic actions needed to execute them. This highlights the lack of a systematic account of the manipulation skills required for robots in chemistry laboratories. To address this gap, we introduce TARMAC - a Taxonomy for Robot Manipulation in Chemistry - a domain-specific framework that defines and organizes the core manipulations needed in laboratory practice. Based on annotated teaching-lab demonstrations and supported by experimental validation, TARMAC categorizes actions according to their functional role and physical execution requirements. Beyond serving as a descriptive vocabulary, TARMAC can be instantiated as robot-executable primitives and composed into higher-level macros, enabling skill reuse and supporting scalable integration into long-horizon workflows. These contributions provide a structured foundation for more flexible and autonomous laboratory automation. More information is available at https://tarmac-paper.github.io/