Motion Planning and Control of an Overactuated 4-Wheel Drive with Constrained Independent Steering
作者: Shiyu Liu, Ilija Hadzic, Akshay Gupta, Aliasghar Arab
分类: cs.RO, eess.SY
发布日期: 2025-10-21
备注: 7 pages, 5 figures, 3 tables, video available at https://youtu.be/8l9s2Wb_vec, To appear at IEEE 2025 International Conference on Advanced Robotics
💡 一句话要点
针对4WIS机器人,提出考虑转向约束的运动规划与控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四轮独立转向 运动规划 运动控制 转向约束 机器人导航 ROS 超驱动机器人
📋 核心要点
- 现有4WIS机器人运动规划方法难以处理转向机构的机械约束,导致运动不平滑甚至失效。
- 论文提出了一种显式考虑转向约束的运动规划与控制框架,保证运动平滑性和效率。
- 通过仿真和物理机器人实验验证了所提方法的有效性,并将其集成到ROS Navigation框架中。
📝 摘要(中文)
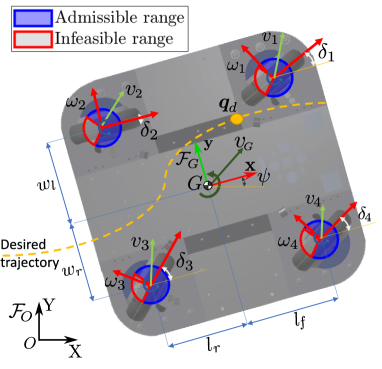
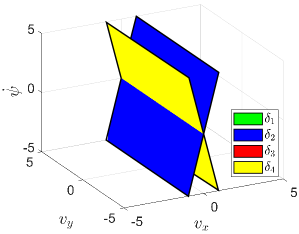
本文研究了一种具有独立转向(4WIS)的超驱动四轮驱动系统的运动规划与控制问题,该系统存在机械约束,导致车轮无法执行完整的360度旋转(全向轮)。这种机器人的构型空间受到约束,并包含影响机器人运动平滑性的不连续点。我们引入了转向约束的数学公式,并推导了将速度空间划分为平滑和高效运动区域的不连续平面。此外,我们设计了用于路径跟踪和避障的运动规划器,该规划器显式地考虑了转向约束和速度过渡平滑性。运动控制器使用局部反馈从期望速度生成驱动,同时通过临时停止运动并重新定位车轮来正确处理不连续点的跨越。我们将提出的运动规划器作为ROS Navigation包的扩展来实现,并在仿真和物理机器人上评估了该系统。
🔬 方法详解
问题定义:论文旨在解决具有独立转向(4WIS)的超驱动四轮驱动机器人在存在转向约束(车轮无法360度旋转)情况下的运动规划与控制问题。现有方法通常忽略或简化这些约束,导致规划出的轨迹不平滑、效率低下,甚至无法执行。这些约束导致构型空间存在不连续性,使得传统的运动规划算法难以直接应用。
核心思路:论文的核心思路是显式地建模转向约束,并将其纳入运动规划和控制过程中。具体而言,首先对转向约束进行数学建模,然后推导出速度空间中的不连续平面,这些平面将速度空间划分为不同的区域,每个区域对应不同的运动模式。运动规划器在规划路径时,会考虑这些不连续平面,以确保生成的轨迹是平滑且可行的。运动控制器则负责根据期望速度生成驱动信号,并在跨越不连续平面时采取特殊措施(例如,临时停止并重新定位车轮),以避免运动突变。
技术框架:整体框架包括以下几个主要模块:1) 转向约束建模模块:对4WIS机器人的转向机构进行数学建模,显式地表示转向角度的约束。2) 不连续平面推导模块:基于转向约束,推导出速度空间中的不连续平面。3) 运动规划器:该规划器以ROS Navigation包为基础,并进行了扩展,使其能够考虑转向约束和速度过渡平滑性。4) 运动控制器:该控制器使用局部反馈来生成驱动信号,并处理不连续点的跨越。
关键创新:论文的关键创新在于:1) 提出了转向约束的数学公式,能够准确地描述4WIS机器人的转向机构的约束。2) 推导了速度空间中的不连续平面,为运动规划提供了重要的信息。3) 设计了一种能够显式地考虑转向约束的运动规划器和控制器,保证了运动的平滑性和效率。与现有方法相比,该方法能够更好地处理4WIS机器人的特殊约束,从而实现更高效、更可靠的运动。
关键设计:论文中,转向约束的数学公式是基于机器人几何结构和转向机构的物理限制推导出来的。不连续平面的推导涉及到一些几何计算和代数运算。运动规划器采用了A*算法,并结合了对转向约束的考虑。运动控制器采用了PID控制,并针对不连续点的跨越设计了特殊的处理策略,例如,当机器人即将跨越不连续平面时,控制器会临时停止运动,并重新定位车轮,以确保运动的平滑过渡。
🖼️ 关键图片

📊 实验亮点
论文在仿真和物理机器人上进行了实验验证。实验结果表明,所提出的方法能够有效地处理转向约束,并实现平滑、高效的运动。与传统的运动规划方法相比,该方法能够显著提高机器人的运动效率和精度。具体数据未知,但文中强调了在复杂环境下的性能提升。
🎯 应用场景
该研究成果可应用于各种需要高精度运动控制的4WIS机器人平台,例如自动驾驶车辆、仓储机器人、农业机器人等。通过显式考虑转向约束,可以提高机器人的运动效率和安全性,使其能够在复杂环境中更好地完成任务。未来,该方法可以进一步扩展到其他类型的机器人平台,例如具有更多自由度的机器人臂。
📄 摘要(原文)
This paper addresses motion planning and con- trol of an overactuated 4-wheel drive train with independent steering (4WIS) where mechanical constraints prevent the wheels from executing full 360-degree rotations (swerve). The configuration space of such a robot is constrained and contains discontinuities that affect the smoothness of the robot motion. We introduce a mathematical formulation of the steering constraints and derive discontinuity planes that partition the velocity space into regions of smooth and efficient motion. We further design the motion planner for path tracking and ob- stacle avoidance that explicitly accounts for swerve constraints and the velocity transition smoothness. The motion controller uses local feedback to generate actuation from the desired velocity, while properly handling the discontinuity crossing by temporarily stopping the motion and repositioning the wheels. We implement the proposed motion planner as an extension to ROS Navigation package and evaluate the system in simulation and on a physical robot.