Towards Proprioceptive Terrain Mapping with Quadruped Robots for Exploration in Planetary Permanently Shadowed Regions
作者: Alberto Sanchez-Delgado, João Carlos Virgolino Soares, Victor Barasuol, Claudio Semini
分类: cs.RO
发布日期: 2025-10-21
备注: Published in the Proceedings of the International Conference on Space Robotics (iSpaRo 2025)
💡 一句话要点
面向行星阴影区探索,提出基于四足机器人本体感受的地形建图方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 地形建图 本体感受 行星探索 永久阴影区
📋 核心要点
- 现有方法依赖外部传感器进行地形建图,忽略了机器人与环境的物理交互,限制了在复杂地形下的导航能力。
- 该论文提出了一种基于四足机器人本体感受的地形建图框架,通过内部传感器估计地形属性,构建交互感知的地图。
- 在模拟月球环境中,使用Aliengo机器人验证了该框架的有效性,证明了其在月球重力和地形条件下的建图能力。
📝 摘要(中文)
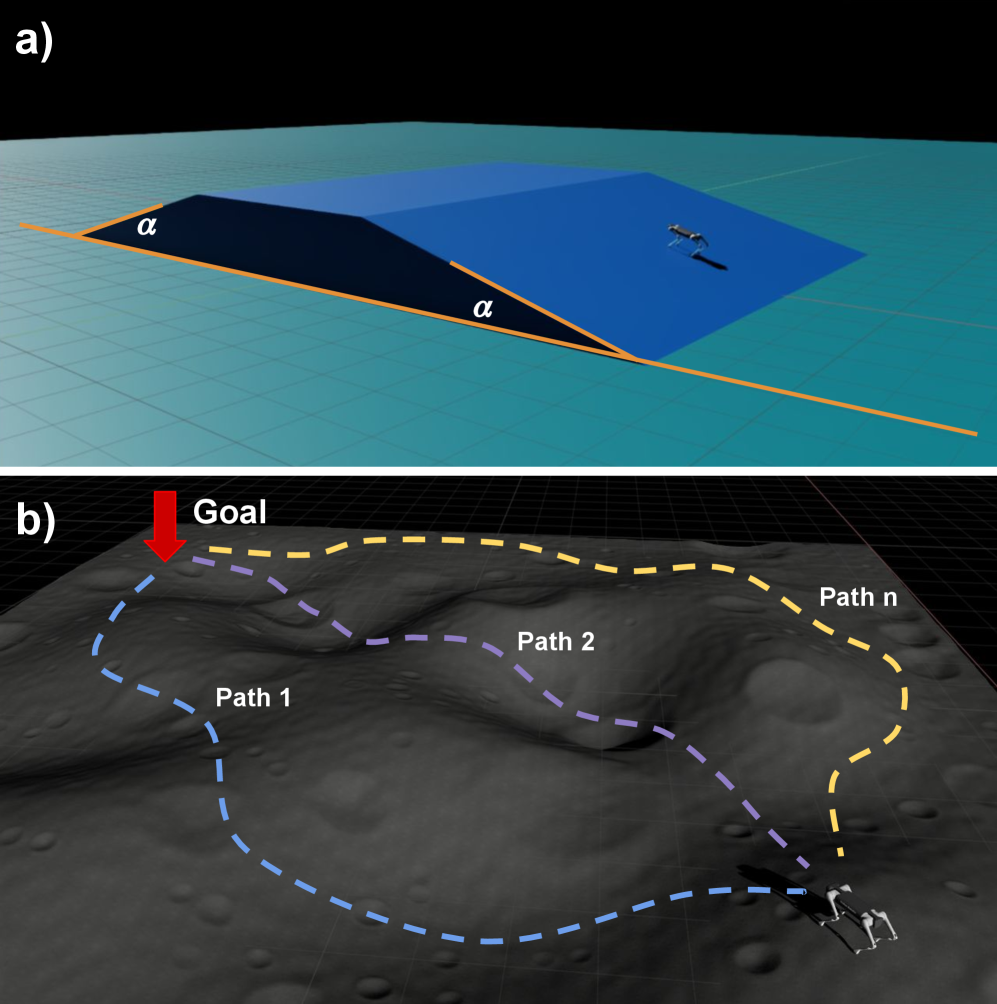
月球极地附近的永久阴影区(PSRs)因可能含有水冰和保存地质记录而备受关注。其复杂、不平坦的地形适合使用腿式机器人,这种机器人可以穿越具有挑战性的表面,同时收集原位数据,并且在地球类似环境中(包括黑暗洞穴)已被证明是有效的,前提是配备了车载照明。虽然像相机和激光雷达这样的外部传感器可以捕获地形几何形状甚至语义信息,但它们无法量化其与机器人的物理交互,而本体感受可以提供这种能力。我们提出了一种用于四足机器人的地形建图框架,该框架通过运动过程中的内部感知来估计高程、足部滑移、能量消耗和稳定性裕度。这些指标被增量式地集成到一个多层2.5D栅格地图中,该地图反映了机器人视角下的地形交互。该系统在一个模拟月球环境的模拟器中进行了评估,使用了21公斤的四足机器人Aliengo,结果表明在月球重力和地形条件下具有一致的建图性能。
🔬 方法详解
问题定义:现有地形建图方法主要依赖于外部传感器,如相机和激光雷达,这些传感器虽然可以提供地形的几何和语义信息,但无法直接感知机器人与地形之间的物理交互。在复杂地形下,这种交互信息对于机器人安全、高效的运动至关重要。因此,需要一种能够从机器人自身角度感知地形属性的建图方法。
核心思路:该论文的核心思路是利用四足机器人的本体感受信息,即通过感知自身的状态(如关节角度、力矩等)来推断地形的属性。通过分析机器人在运动过程中与地形的交互,估计地形的高程、足部滑移、能量消耗和稳定性裕度等指标,从而构建一个交互感知的地形地图。这种方法能够更准确地反映地形对机器人运动的影响。
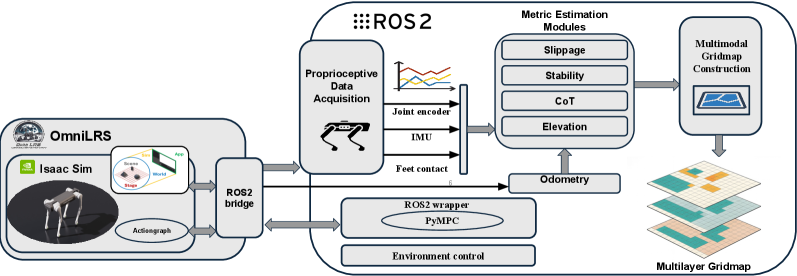
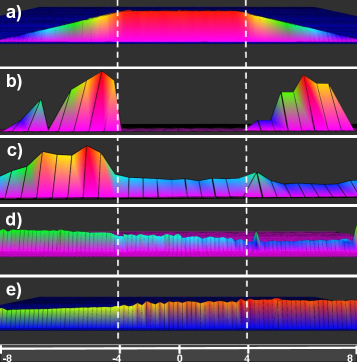
技术框架:该地形建图框架主要包含以下几个模块:1) 数据采集模块:通过机器人的内部传感器(如IMU、关节编码器、力传感器等)采集运动数据。2) 地形属性估计模块:利用采集到的数据,估计地形的高程、足部滑移、能量消耗和稳定性裕度等指标。3) 地图构建模块:将估计出的地形属性增量式地集成到一个多层2.5D栅格地图中。该地图的每一层代表一种地形属性,例如高程层、滑移层、能量消耗层和稳定性层。4) 地图更新模块:根据机器人的运动和新的观测数据,不断更新地图。
关键创新:该论文最重要的技术创新点在于利用本体感受信息进行地形建图。与传统的基于外部传感器的建图方法相比,该方法能够直接感知机器人与地形之间的物理交互,从而构建一个更适合机器人运动规划和控制的地形地图。此外,该论文还提出了一种多层2.5D栅格地图的表示方法,能够有效地存储和管理多种地形属性。
关键设计:在地形属性估计模块中,论文可能使用了卡尔曼滤波或其他状态估计方法来融合来自不同传感器的信息,以提高估计的准确性。在地图构建模块中,论文可能使用了概率栅格地图的方法来处理不确定性。此外,论文可能还设计了一些特定的损失函数来优化地形属性的估计,例如,可以使用能量消耗的损失函数来约束地形的平滑性。
🖼️ 关键图片
📊 实验亮点
该论文在模拟月球环境中对提出的地形建图框架进行了评估,使用了21公斤的四足机器人Aliengo。实验结果表明,该框架能够在月球重力和地形条件下实现一致的建图性能。虽然论文没有给出具体的性能数据,但强调了该方法在模拟环境中的有效性,为未来在真实月球环境中应用奠定了基础。
🎯 应用场景
该研究成果可应用于月球、火星等行星表面的探索任务,尤其是在永久阴影区等复杂、未知的环境中。通过构建交互感知的地形地图,可以提高机器人的自主导航能力,使其能够安全、高效地完成科学考察和资源勘探等任务。此外,该方法还可以应用于灾后救援、矿山勘探等领域。
📄 摘要(原文)
Permanently Shadowed Regions (PSRs) near the lunar poles are of interest for future exploration due to their potential to contain water ice and preserve geological records. Their complex, uneven terrain favors the use of legged robots, which can traverse challenging surfaces while collecting in-situ data, and have proven effective in Earth analogs, including dark caves, when equipped with onboard lighting. While exteroceptive sensors like cameras and lidars can capture terrain geometry and even semantic information, they cannot quantify its physical interaction with the robot, a capability provided by proprioceptive sensing. We propose a terrain mapping framework for quadruped robots, which estimates elevation, foot slippage, energy cost, and stability margins from internal sensing during locomotion. These metrics are incrementally integrated into a multi-layer 2.5D gridmap that reflects terrain interaction from the robot's perspective. The system is evaluated in a simulator that mimics a lunar environment, using the 21 kg quadruped robot Aliengo, showing consistent mapping performance under lunar gravity and terrain conditions.