Towards An Adaptive Locomotion Strategy For Quadruped Rovers: Quantifying When To Slide Or Walk On Planetary Slopes
作者: Alberto Sanchez-Delgado, João Carlos Virgolino Soares, David Omar Al Tawil, Alessia Li Noce, Matteo Villa, Victor Barasuol, Paolo Arena, Claudio Semini
分类: cs.RO
发布日期: 2025-10-21
备注: Published at the 18th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA 2025)
💡 一句话要点
针对行星斜坡地形,提出四足机器人自适应行走/滑行策略
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 自适应运动 行星探测 运输成本 斜坡地形
📋 核心要点
- 传统腿式机器人在松散斜坡地形能量效率低,存在安全隐患,需要更适应环境的运动方式。
- 通过比较行走和滑行的运输成本,寻找切换两种运动模式的阈值条件,实现自适应运动。
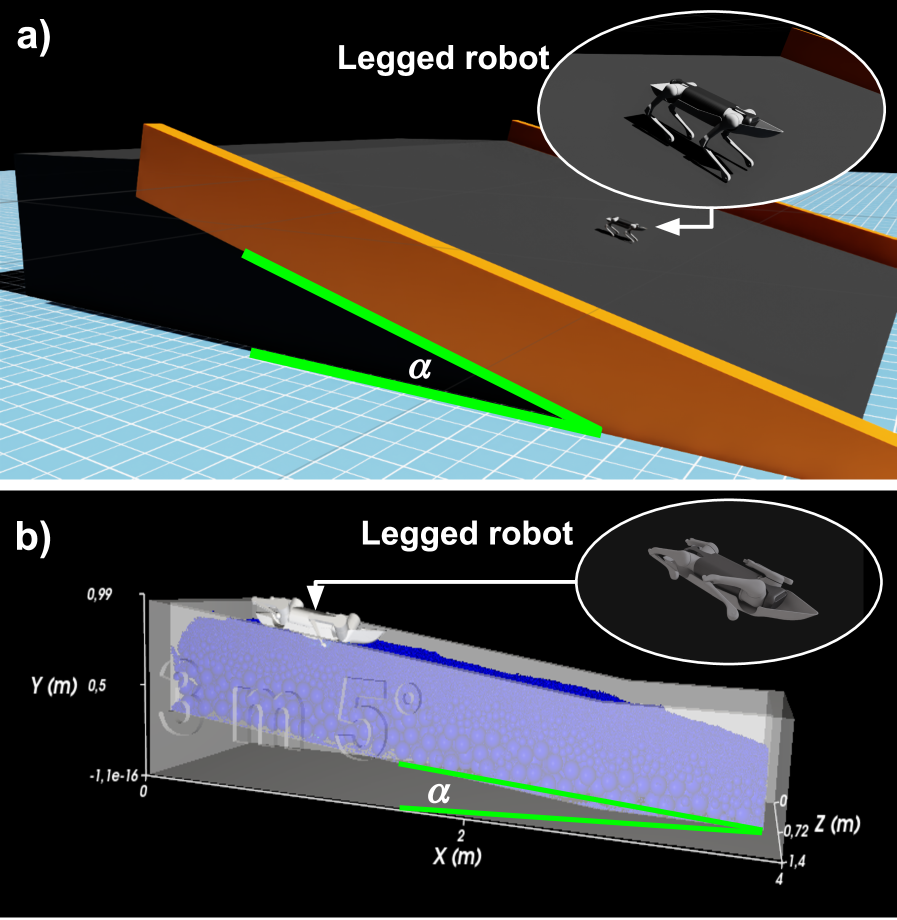
- 结合Isaac Sim仿真和ANSYS-Rocky粒子交互验证,为行星探测腿式机器人提供初步的自适应运动策略。
📝 摘要(中文)
腿式漫游车相比轮式平台具有更强的移动性,能够在陡峭和不规则的行星地形上导航。然而,传统的腿式运动在松散和倾斜的表面(如陨石坑壁和洞穴斜坡)上可能能量效率低下,并可能对漫游车造成危险。本文介绍了一项初步研究,比较了四足机器人在不同坡度、摩擦条件和速度水平下行走和基于躯干的滑行运动的运输成本(CoT)。通过识别行走和滑行CoT曲线之间的交点,旨在定义可能触发两种策略之间转换的阈值条件。该方法结合了Isaac Sim中基于物理的仿真和ANSYS-Rocky中的粒子相互作用验证。我们的结果代表了行星腿式漫游车自适应运动策略的初步步骤。
🔬 方法详解
问题定义:论文旨在解决四足机器人在行星表面的斜坡地形上,如何选择最优的运动方式(行走或滑行)以降低能量消耗并提高安全性的问题。现有方法通常采用固定的行走模式,在松散和倾斜的表面上效率低下,甚至可能导致机器人倾覆。因此,需要一种能够根据地形自适应调整运动策略的方法。
核心思路:论文的核心思路是通过比较行走和滑行两种运动方式的运输成本(Cost of Transport, CoT),找到一个阈值条件,当实际环境参数超过该阈值时,切换到更优的运动方式。这种方法旨在实现能量效率和安全性的平衡,使机器人能够更好地适应复杂的行星地形。
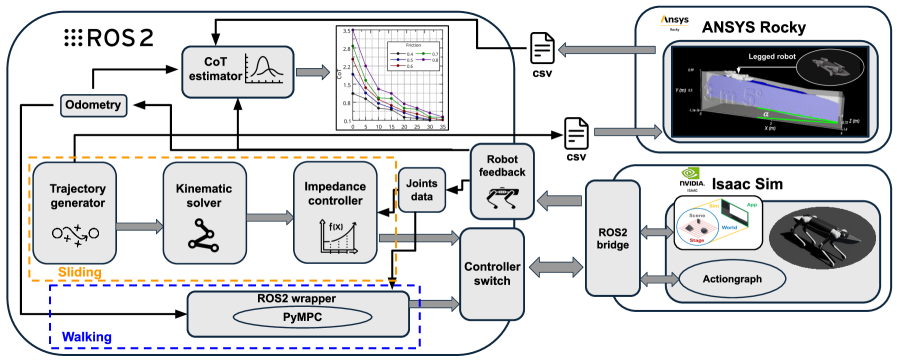
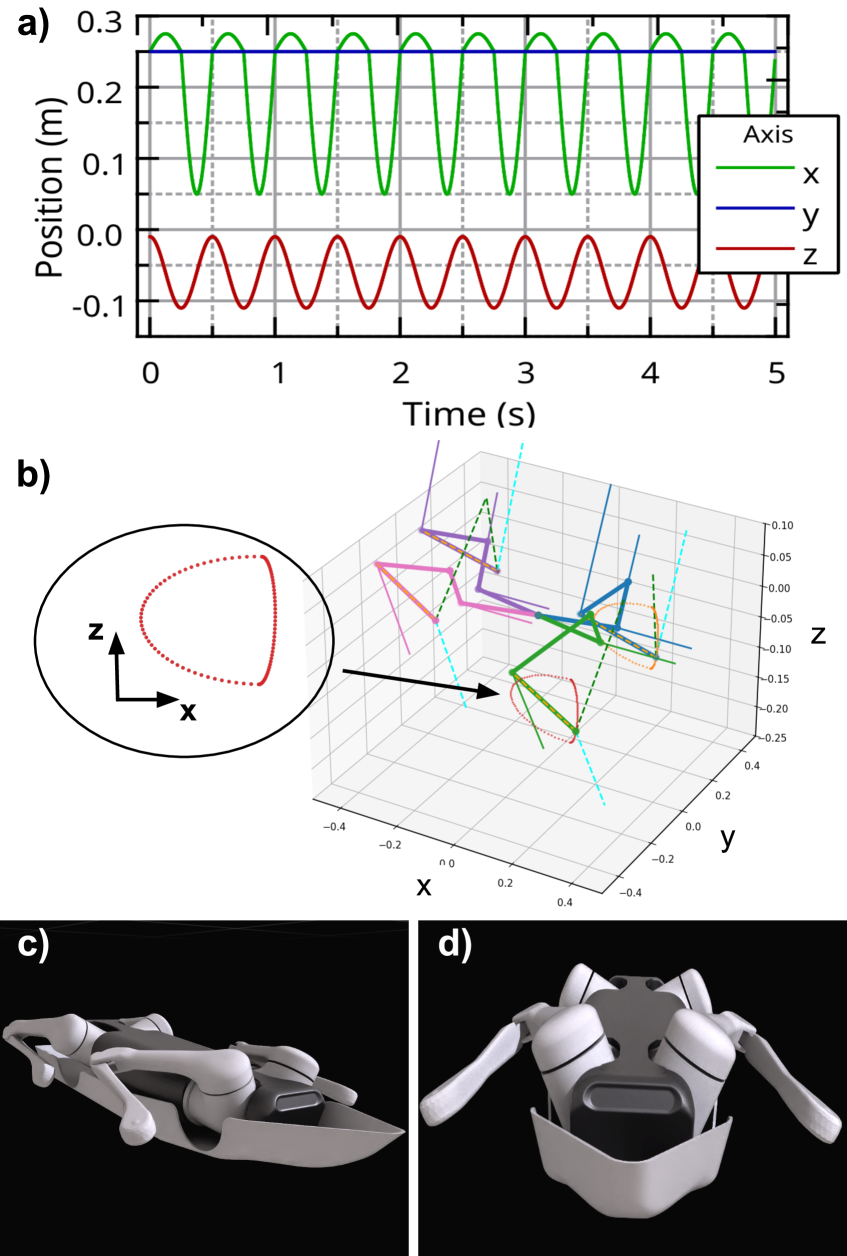
技术框架:该研究的技术框架主要包括以下几个阶段: 1. 环境建模:在Isaac Sim中建立不同坡度、摩擦系数的斜坡地形。 2. 运动仿真:分别对四足机器人的行走和滑行运动进行仿真,记录不同参数下的能量消耗。 3. 粒子交互验证:使用ANSYS-Rocky进行粒子交互仿真,验证Isaac Sim中物理模型的准确性。 4. CoT计算与比较:计算行走和滑行运动的CoT,并找到CoT曲线的交点,确定切换阈值。 5. 策略验证:在仿真环境中验证自适应运动策略的有效性。
关键创新:论文的关键创新在于提出了一种基于运输成本比较的自适应运动策略。与传统的固定运动模式相比,该策略能够根据地形参数动态选择最优的运动方式,从而提高能量效率和安全性。此外,结合Isaac Sim和ANSYS-Rocky进行仿真验证,提高了研究结果的可靠性。
关键设计:论文的关键设计包括: 1. 运输成本(CoT)的定义:CoT被定义为单位距离的能量消耗,用于衡量不同运动方式的效率。 2. 仿真参数的设置:在Isaac Sim中,需要设置坡度、摩擦系数、机器人速度等参数,以模拟不同的地形条件。 3. 切换阈值的确定:通过比较行走和滑行CoT曲线的交点,确定切换运动方式的阈值条件。 4. 粒子交互模型的建立:在ANSYS-Rocky中建立粒子交互模型,用于验证Isaac Sim中物理模型的准确性。
🖼️ 关键图片
📊 实验亮点
该研究初步结果表明,在特定坡度和摩擦条件下,滑行运动的运输成本低于行走运动。通过仿真实验,确定了行走和滑行运动CoT曲线的交点,为自适应运动策略的实现提供了依据。虽然目前仍处于初步研究阶段,但已为行星腿式机器人的运动控制提供了新的思路。
🎯 应用场景
该研究成果可应用于行星探测任务中的腿式机器人,使其能够在火星、月球等复杂地形上更高效、安全地移动。通过自适应调整运动策略,机器人可以更好地适应松散斜坡、陨石坑等挑战性地形,从而扩大探测范围,提高任务成功率。此外,该方法也可应用于地面救援、矿山勘探等领域。
📄 摘要(原文)
Legged rovers provide enhanced mobility compared to wheeled platforms, enabling navigation on steep and irregular planetary terrains. However, traditional legged locomotion might be energetically inefficient and potentially dangerous to the rover on loose and inclined surfaces, such as crater walls and cave slopes. This paper introduces a preliminary study that compares the Cost of Transport (CoT) of walking and torso-based sliding locomotion for quadruped robots across different slopes, friction conditions and speed levels. By identifying intersections between walking and sliding CoT curves, we aim to define threshold conditions that may trigger transitions between the two strategies. The methodology combines physics-based simulations in Isaac Sim with particle interaction validation in ANSYS-Rocky. Our results represent an initial step towards adaptive locomotion strategies for planetary legged rovers.