Quadrupeds for Planetary Exploration: Field Testing Control Algorithms on an Active Volcano
作者: Shubham Vyas, Franek Stark, Rohit Kumar, Hannah Isermann, Jonas Haack, Mihaela Popescu, Jakob Middelberg, Dennis Mronga, Frank Kirchner
分类: cs.RO
发布日期: 2025-10-21
备注: Presented at 18th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA)
期刊: 18th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), 2025
💡 一句话要点
在活火山上测试四足机器人控制算法,用于行星探索
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 行星探测 自适应控制 最优控制 火山环境
📋 核心要点
- 轮式漫游车在复杂地形受限,腿式机器人能有效扩展行星探索任务的范围和能力。
- 论文验证了最先进的自适应最优控制算法,用于四足机器人在类似月球和火星表面的环境中运动。
- 通过在活火山上的实地实验,验证了控制算法在真实复杂环境下的有效性。
📝 摘要(中文)
像Ingenuity直升机这样的任务已经展示了使用新型运动模式来增加行星探索任务科学回报的优势。与轮式漫游车相比,腿式机器人可以通过更困难的地形来进一步扩展未来行星任务的范围和能力,例如跳过地面上的裂缝或穿越有巨石的崎岖地形。为了开发和测试用于四足机器人的算法,DFKI开展了AAPLE项目。作为项目的一部分,我们在意大利西西里岛附近的埃奥利群岛武尔卡诺火山上进行了一系列实地实验,这是一座活火山。实验的重点是验证新开发的、最先进的自适应最优控制算法,用于在月球和火星表面的高保真模拟环境中进行四足运动。本文介绍了武尔卡诺火山实验的技术方法、测试计划、软件架构、现场部署策略和评估结果。
🔬 方法详解
问题定义:现有行星探测任务主要依赖轮式漫游车,但在崎岖地形(如存在裂缝、巨石)下的移动能力受限。腿式机器人,特别是四足机器人,具有更强的地形适应性,但需要先进的控制算法才能在复杂环境下稳定、高效地运动。论文旨在验证并改进适用于行星探测的四足机器人控制算法,使其能够在类似月球和火星表面的环境中可靠运行。
核心思路:论文的核心思路是利用自适应最优控制算法,使四足机器人能够根据地形变化和自身状态进行实时调整,从而实现稳定、高效的运动。这种方法旨在克服传统控制算法在面对未知或变化环境时的局限性,提高机器人的自主性和适应性。
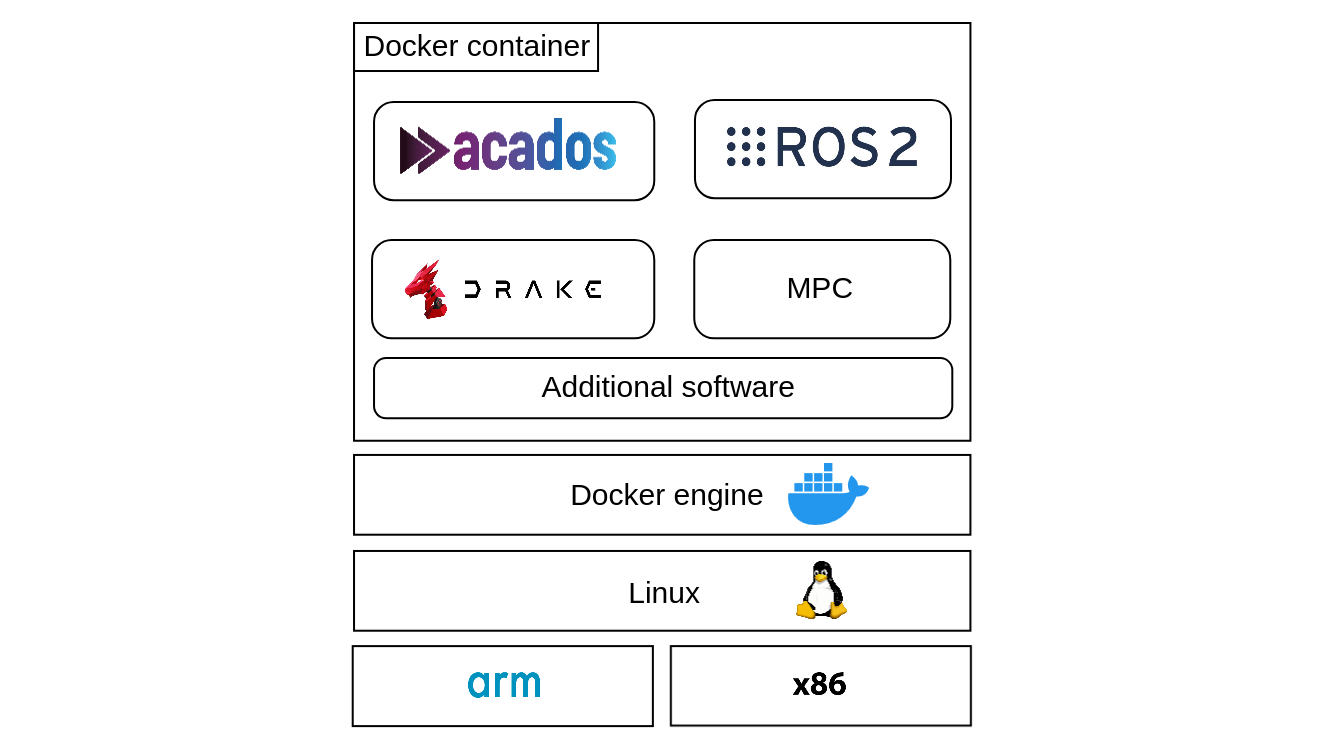
技术框架:整体框架包含以下几个主要部分:1) 机器人本体:使用DFKI开发的四足机器人平台。2) 环境感知:通过传感器获取地形信息。3) 控制算法:采用自适应最优控制算法,根据感知到的环境信息和机器人状态,生成运动指令。4) 运动执行:机器人执行控制指令,完成运动。5) 评估与反馈:通过实验数据评估控制算法的性能,并根据结果进行调整和优化。
关键创新:论文的关键创新在于将自适应最优控制算法应用于行星探测四足机器人,并在真实火山环境中进行了验证。这种方法能够根据地形变化和机器人状态进行实时调整,从而提高机器人的自主性和适应性。此外,在火山环境下的实验也为算法的鲁棒性和可靠性提供了重要的验证。
关键设计:论文中未明确给出关键参数设置、损失函数、网络结构等技术细节。自适应最优控制算法的具体实现细节未知,但可以推测可能涉及到模型预测控制(MPC)、强化学习等技术,以及针对四足机器人运动学和动力学的建模。
🖼️ 关键图片


📊 实验亮点
该研究在意大利武尔卡诺火山进行了实地实验,验证了自适应最优控制算法在真实复杂环境下的有效性。虽然论文没有提供具体的性能数据和对比基线,但火山环境的复杂性和不确定性本身就对算法的鲁棒性提出了很高的要求。实验结果表明,该算法能够使四足机器人在火山地形上稳定运动,为未来的行星探测任务提供了重要的参考。
🎯 应用场景
该研究成果可应用于未来的行星探测任务,例如月球和火星表面的勘探、资源调查和科学研究。腿式机器人能够到达轮式漫游车无法到达的区域,从而扩大探测范围,提高科学回报。此外,该技术还可应用于灾害救援、工业巡检等领域,在复杂和危险环境中替代人类进行作业。
📄 摘要(原文)
Missions such as the Ingenuity helicopter have shown the advantages of using novel locomotion modes to increase the scientific return of planetary exploration missions. Legged robots can further expand the reach and capability of future planetary missions by traversing more difficult terrain than wheeled rovers, such as jumping over cracks on the ground or traversing rugged terrain with boulders. To develop and test algorithms for using quadruped robots, the AAPLE project was carried out at DFKI. As part of the project, we conducted a series of field experiments on the Volcano on the Aeolian island of Vulcano, an active stratovolcano near Sicily, Italy. The experiments focused on validating newly developed state-of-the-art adaptive optimal control algorithms for quadrupedal locomotion in a high-fidelity analog environment for Lunar and Martian surfaces. This paper presents the technical approach, test plan, software architecture, field deployment strategy, and evaluation results from the Vulcano campaign.