RoboChallenge: Large-scale Real-robot Evaluation of Embodied Policies
作者: Adina Yakefu, Bin Xie, Chongyang Xu, Enwen Zhang, Erjin Zhou, Fan Jia, Haitao Yang, Haoqiang Fan, Haowei Zhang, Hongyang Peng, Jing Tan, Junwen Huang, Kai Liu, Kaixin Liu, Kefan Gu, Qinglun Zhang, Ruitao Zhang, Saike Huang, Shen Cheng, Shuaicheng Liu, Tiancai Wang, Tiezhen Wang, Wei Sun, Wenbin Tang, Yajun Wei, Yang Chen, Youqiang Gui, Yucheng Zhao, Yunchao Ma, Yunfei Wei, Yunhuan Yang, Yutong Guo, Ze Chen, Zhengyuan Du, Ziheng Zhang, Ziming Liu, Ziwei Yan
分类: cs.RO
发布日期: 2025-10-20
备注: Authors are listed in alphabetical order. The official website is located at https://robochallenge.ai
💡 一句话要点
RoboChallenge:大规模真实机器人环境下的具身智能策略评估系统
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人控制 具身智能 真实机器人评估 大规模评估 在线评估系统
📋 核心要点
- 现有机器人控制算法,特别是基于学习的算法,缺乏大规模、可重复的真实机器人环境评估。
- 论文提出了RoboChallenge,一个在线评估系统,旨在提供大规模、可扩展和可重复的真实机器人评估平台。
- 论文使用RoboChallenge对当前最先进的VLA模型进行了初步评估,为后续研究提供了基准。
📝 摘要(中文)
在真实机器人上进行测试对于机器人控制算法至关重要。特别是在基于学习的算法,尤其是VLA模型(未知)的背景下,对大规模评估的需求,即在大量任务上测试大量模型,变得越来越迫切。然而,正确地做到这一点非常重要,尤其是在考虑到可扩展性和可重复性的情况下。本报告描述了我们构建RoboChallenge的方法,这是一个用于测试机器人控制算法的在线评估系统,以及我们使用初始基准Table30对最近最先进的VLA模型进行的调查。
🔬 方法详解
问题定义:目前机器人控制算法,尤其是基于学习的VLA模型,在真实机器人上的大规模评估面临挑战。现有方法难以兼顾可扩展性、可重复性和真实环境的复杂性,导致算法的实际性能难以准确评估。缺乏统一的评估标准和平台,使得不同算法之间的比较变得困难。
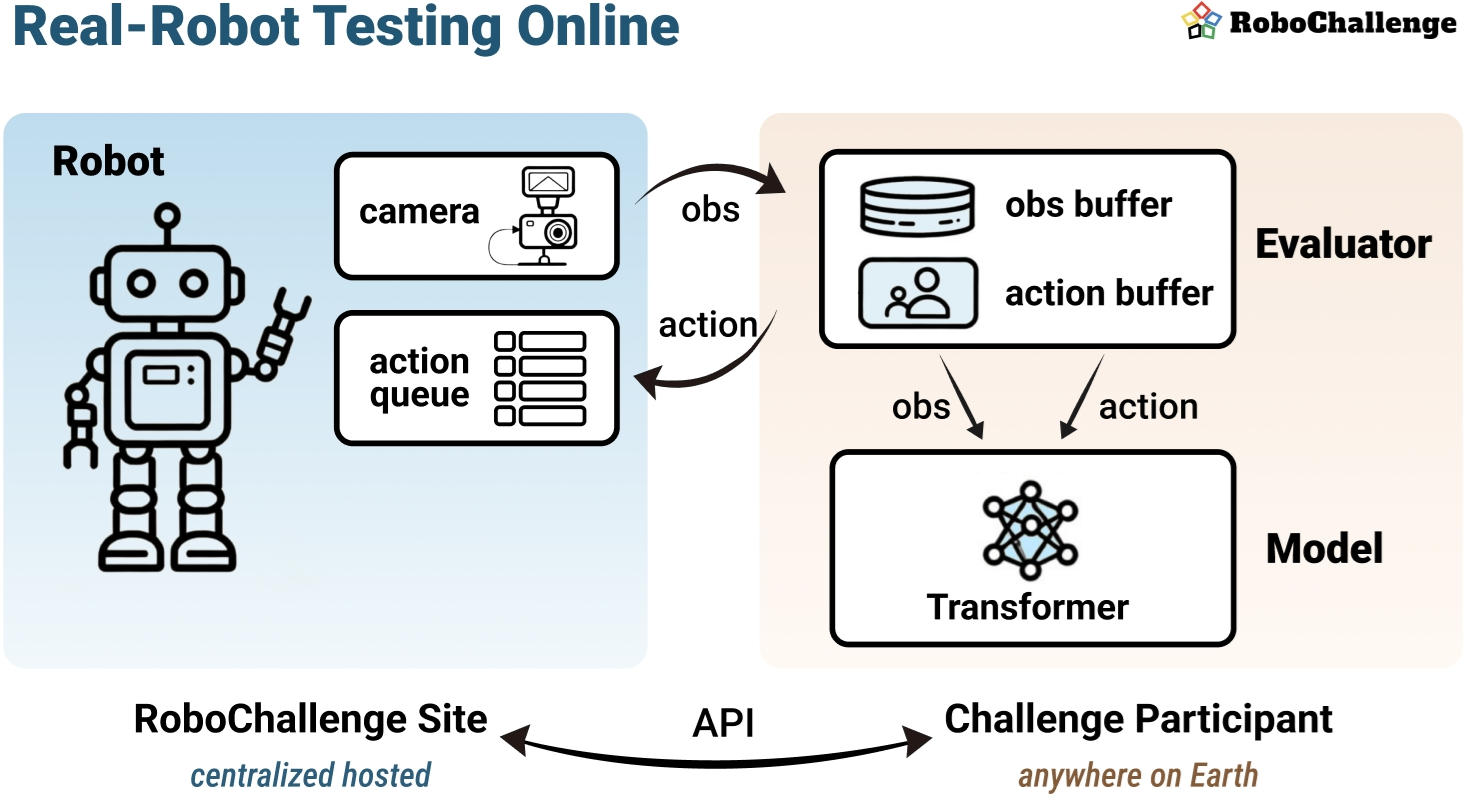
核心思路:RoboChallenge的核心思路是构建一个在线评估系统,该系统能够自动化地在真实机器人上执行各种任务,并记录和分析算法的性能。通过提供统一的接口和评估指标,RoboChallenge旨在促进机器人控制算法的公平比较和快速迭代。该系统强调可扩展性和可重复性,以便支持大规模的实验和长期研究。
技术框架:RoboChallenge的整体架构包含以下几个主要模块:任务定义模块、模型部署模块、机器人控制模块、数据采集模块和评估模块。任务定义模块负责定义各种机器人任务,包括任务目标、环境设置和评估指标。模型部署模块负责将待评估的算法模型部署到机器人控制系统中。机器人控制模块负责根据算法模型的输出控制机器人的运动。数据采集模块负责收集机器人在执行任务过程中的各种数据,包括传感器数据、控制指令和任务完成情况。评估模块负责根据采集到的数据计算算法模型的性能指标,并生成评估报告。
关键创新:RoboChallenge的关键创新在于其提供了一个大规模、可扩展和可重复的真实机器人评估平台。与传统的离线仿真评估相比,RoboChallenge能够更准确地评估算法在真实环境中的性能。与手工评估相比,RoboChallenge能够自动化地执行大量的实验,并提供统一的评估指标,从而提高评估效率和公平性。
关键设计:RoboChallenge的关键设计包括:1) 模块化的系统架构,方便扩展和定制;2) 统一的接口和评估指标,方便算法的比较和集成;3) 自动化的实验流程,提高评估效率;4) 可靠的数据采集和存储机制,保证评估结果的准确性;5) 安全的机器人控制策略,防止机器人损坏。
🖼️ 关键图片

📊 实验亮点
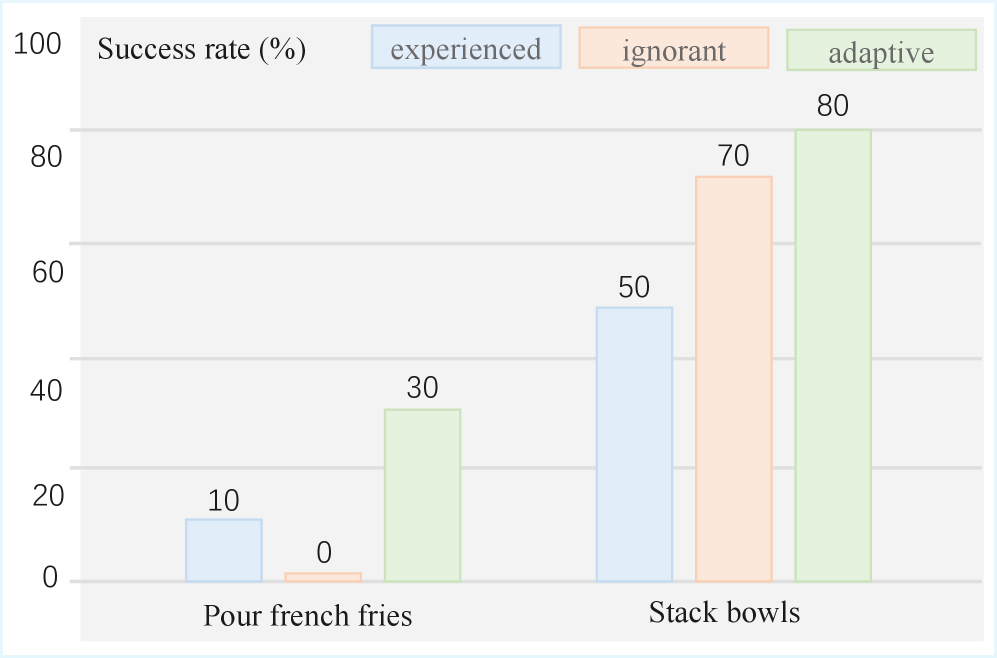
论文初步使用RoboChallenge评估了Table30基准上的VLA模型(未知)。具体性能数据未知,但该评估为后续研究提供了重要的基准和参考。RoboChallenge的成功构建为大规模真实机器人评估提供了可能性,有望加速机器人控制算法的研发。
🎯 应用场景
RoboChallenge可应用于各种机器人控制算法的评估和优化,包括但不限于:强化学习、模仿学习、运动规划和视觉伺服。该平台能够加速机器人技术的研发进程,促进机器人技术在工业自动化、物流、医疗、家庭服务等领域的应用。未来,RoboChallenge有望成为机器人领域的重要基础设施,为学术界和工业界提供强大的支持。
📄 摘要(原文)
Testing on real machines is indispensable for robotic control algorithms. In the context of learning-based algorithms, especially VLA models, demand for large-scale evaluation, i.e. testing a large number of models on a large number of tasks, is becoming increasingly urgent. However, doing this right is highly non-trivial, especially when scalability and reproducibility is taken into account. In this report, we describe our methodology for constructing RoboChallenge, an online evaluation system to test robotic control algorithms, and our survey of recent state-of-the-art VLA models using our initial benchmark Table30.