Distributed Spatial-Temporal Trajectory Optimization for Unmanned-Aerial-Vehicle Swarm
作者: Xiaobo Zheng, Pan Tang, Defu Lin, Shaoming He
分类: cs.RO
发布日期: 2025-10-20
💡 一句话要点
提出基于ADMM和DDP的分布式时空轨迹优化算法,解决无人机集群控制问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机集群 轨迹优化 分布式算法 ADMM 差分动态规划
📋 核心要点
- 现有集群轨迹优化方法需预设最终时间,且迭代次数多,限制了其在大型无人机集群中的应用。
- 论文提出基于ADMM和DDP的分布式框架,实现无人机间的时空参数一致性和快速局部轨迹规划。
- 通过仿真验证了所提算法的有效性,并提出自适应调整准则以减少算法迭代次数。
📝 摘要(中文)
本文提出了一种时空轨迹优化框架,用于实现多无人机(UAV)集群的协同控制。该框架基于交替方向乘子法(ADMM)实现多无人机之间的一致性,并使用差分动态规划(DDP)算法为每个无人机进行快速局部规划。该框架采用两层架构,利用参数化DDP(PDDP)作为每个无人机的轨迹优化器,并使用ADMM来满足局部约束并实现所有无人机之间的时空参数一致性。由此产生了一种完全分布式的算法,称为分布式参数化DDP(D-PDDP)。此外,提出了一种基于谱梯度法的自适应调整准则,用于调整惩罚参数,以减少算法迭代次数。通过多个仿真实例验证了所提出算法的有效性。
🔬 方法详解
问题定义:无人机集群轨迹优化是一个具有强非线性的多智能体最优控制问题。现有方法通常需要预先设定无人机的最终到达时间,这在实际应用中往往难以确定。此外,随着无人机数量的增加,算法的迭代次数显著增加,计算复杂度高,难以应用于大规模无人机集群。
核心思路:论文的核心思路是将集群轨迹优化问题分解为多个局部优化问题,每个无人机独立进行轨迹规划,并通过ADMM算法实现无人机之间的协同和一致性。采用DDP算法进行快速局部规划,利用其高效的迭代优化能力。通过参数化DDP(PDDP)将轨迹表示为参数形式,从而降低优化维度,提高计算效率。
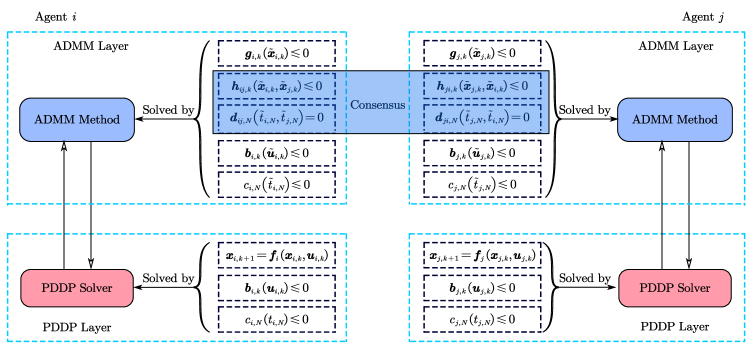
技术框架:该框架是一个两层架构。第一层是局部规划层,每个无人机使用PDDP算法独立进行轨迹优化,生成局部最优轨迹。第二层是协同层,使用ADMM算法实现无人机之间的时空参数一致性。ADMM算法将全局约束分解为局部约束,并通过迭代更新无人机的轨迹参数和对偶变量,最终实现集群的协同控制。
关键创新:该论文的关键创新在于提出了一种完全分布式的轨迹优化算法D-PDDP,该算法能够有效地解决大规模无人机集群的轨迹优化问题。此外,论文还提出了一种基于谱梯度法的自适应调整准则,用于动态调整ADMM算法的惩罚参数,从而减少算法的迭代次数,提高收敛速度。
关键设计:PDDP算法将轨迹表示为参数形式,例如B样条曲线或多项式。ADMM算法的惩罚参数控制着局部约束的违反程度,自适应调整准则根据算法的收敛情况动态调整惩罚参数。损失函数通常包括轨迹的平滑性、避障约束和一致性约束等。
🖼️ 关键图片

📊 实验亮点
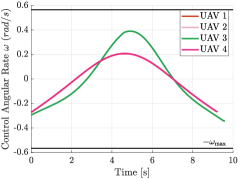
仿真结果表明,所提出的D-PDDP算法能够有效地实现多无人机集群的协同轨迹优化。与传统的集中式优化方法相比,D-PDDP算法具有更高的计算效率和更好的可扩展性。通过自适应调整惩罚参数,算法的迭代次数显著减少,收敛速度加快。具体性能数据未知,但论文强调了算法的有效性和效率。
🎯 应用场景
该研究成果可应用于多种无人机集群应用场景,例如:协同搜索与救援、环境监测、农业植保、物流配送、以及编队飞行表演等。通过分布式优化,可以提高集群的鲁棒性和可扩展性,降低对中心控制器的依赖,使得大规模无人机集群能够更加灵活高效地完成复杂任务。未来的发展方向包括考虑更复杂的环境约束、动态障碍物以及通信延迟等因素。
📄 摘要(原文)
Swarm trajectory optimization problems are a well-recognized class of multi-agent optimal control problems with strong nonlinearity. However, the heuristic nature of needing to set the final time for agents beforehand and the time-consuming limitation of the significant number of iterations prohibit the application of existing methods to large-scale swarm of Unmanned Aerial Vehicles (UAVs) in practice. In this paper, we propose a spatial-temporal trajectory optimization framework that accomplishes multi-UAV consensus based on the Alternating Direction Multiplier Method (ADMM) and uses Differential Dynamic Programming (DDP) for fast local planning of individual UAVs. The introduced framework is a two-level architecture that employs Parameterized DDP (PDDP) as the trajectory optimizer for each UAV, and ADMM to satisfy the local constraints and accomplish the spatial-temporal parameter consensus among all UAVs. This results in a fully distributed algorithm called Distributed Parameterized DDP (D-PDDP). In addition, an adaptive tuning criterion based on the spectral gradient method for the penalty parameter is proposed to reduce the number of algorithmic iterations. Several simulation examples are presented to verify the effectiveness of the proposed algorithm.