An adaptive hierarchical control framework for quadrupedal robots in planetary exploration
作者: Franek Stark, Rohit Kumar, Shubham Vyas, Hannah Isermann, Jonas Haack, Mihaela Popescu, Jakob Middelberg, Dennis Mronga, Frank Kirchner
分类: cs.RO
发布日期: 2025-10-20
备注: Presented at 18th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA)
💡 一句话要点
提出一种自适应分层控制框架,用于行星探测四足机器人未知环境导航。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 行星探测 自适应控制 模型预测控制 步态规划 状态估计 ROS 2
📋 核心要点
- 现有行星探测机器人受限于地形,四足机器人虽有潜力,但未知环境下的控制面临挑战,参数不确定性是主要瓶颈。
- 论文提出一种模块化控制框架,结合模型动态控制、在线模型自适应和自适应步态规划,应对机器人和地形的不确定性。
- 该框架在多种硬件平台和火山地形中验证,机器人成功行走超过700米,证明了其在复杂未知环境下的有效性。
📝 摘要(中文)
行星探测任务需要机器人能够导航极端和未知的环境。轮式漫游车虽然在过去的任务中占据主导地位,但其移动性仅限于可通行的表面。腿式机器人,特别是四足机器人,可以通过处理不平坦、富含障碍物和可变形的地形来克服这些限制。然而,由于需要针对特定环境的控制,在未知条件下部署此类机器人具有挑战性,因为地形和机器人参数是不确定的。本研究提出了一种模块化控制框架,该框架结合了基于模型的动态控制与在线模型自适应和自适应步态规划,以解决机器人和地形属性的不确定性。该框架包括用于四足机器人的状态估计(无论是否具有接触传感),支持运行时重新配置,并已集成到具有开源可用性的ROS 2中。其性能已在两个四足机器人平台、多个硬件架构以及火山现场测试中得到验证,机器人在该测试中行走了超过700米。
🔬 方法详解
问题定义:行星探测任务中,四足机器人需要在未知且复杂的地形上行走。现有方法难以应对机器人自身参数和环境参数的不确定性,导致控制性能下降甚至失效。例如,地形的摩擦系数、坡度以及机器人的质量分布等参数在任务开始前通常是未知的,并且可能随时间变化。
核心思路:论文的核心思路是将模型预测控制(MPC)与在线模型自适应相结合。通过MPC实现动态运动控制,同时利用在线自适应模块估计和更新机器人和环境的模型参数。自适应步态规划模块则根据更新后的模型参数调整步态,从而提高机器人在未知环境中的适应性。
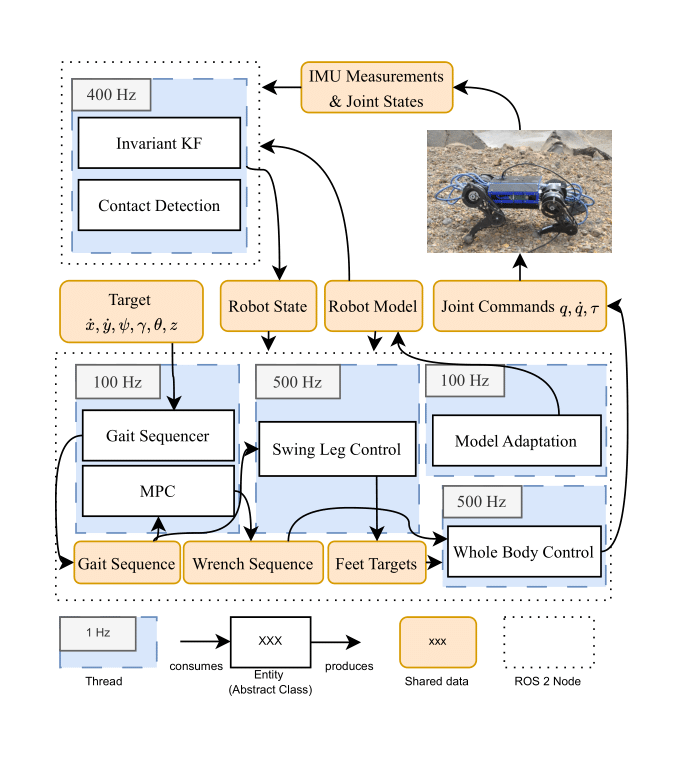
技术框架:该框架采用分层控制结构,主要包括以下模块:1) 状态估计模块:用于估计机器人的状态,包括位置、姿态和速度。该模块支持使用或不使用接触传感器的状态估计方法。2) 模型自适应模块:在线估计机器人和环境的模型参数,例如质量、惯性矩阵和地形摩擦系数。3) 步态规划模块:根据当前状态和模型参数,生成合适的步态序列。4) 动态控制模块:基于模型预测控制,根据步态序列和模型参数,计算关节力矩。这些模块通过ROS 2进行集成,支持运行时重新配置。
关键创新:该论文的关键创新在于将模型自适应与动态控制相结合,实现了在未知环境下的鲁棒运动控制。传统的MPC方法依赖于精确的模型,但在实际应用中,模型参数往往是不确定的。该论文提出的方法通过在线估计和更新模型参数,有效地解决了这个问题。此外,该框架还支持运行时重新配置,可以根据不同的环境和任务需求调整控制策略。
关键设计:模型自适应模块使用递归最小二乘法(RLS)在线估计模型参数。步态规划模块采用基于规则的方法,根据地形和机器人状态选择合适的步态。动态控制模块使用二次规划(QP)求解器计算关节力矩,目标是最小化跟踪误差和控制力矩。框架还考虑了接触力约束和关节力矩限制,以保证运动的安全性。
🖼️ 关键图片

📊 实验亮点
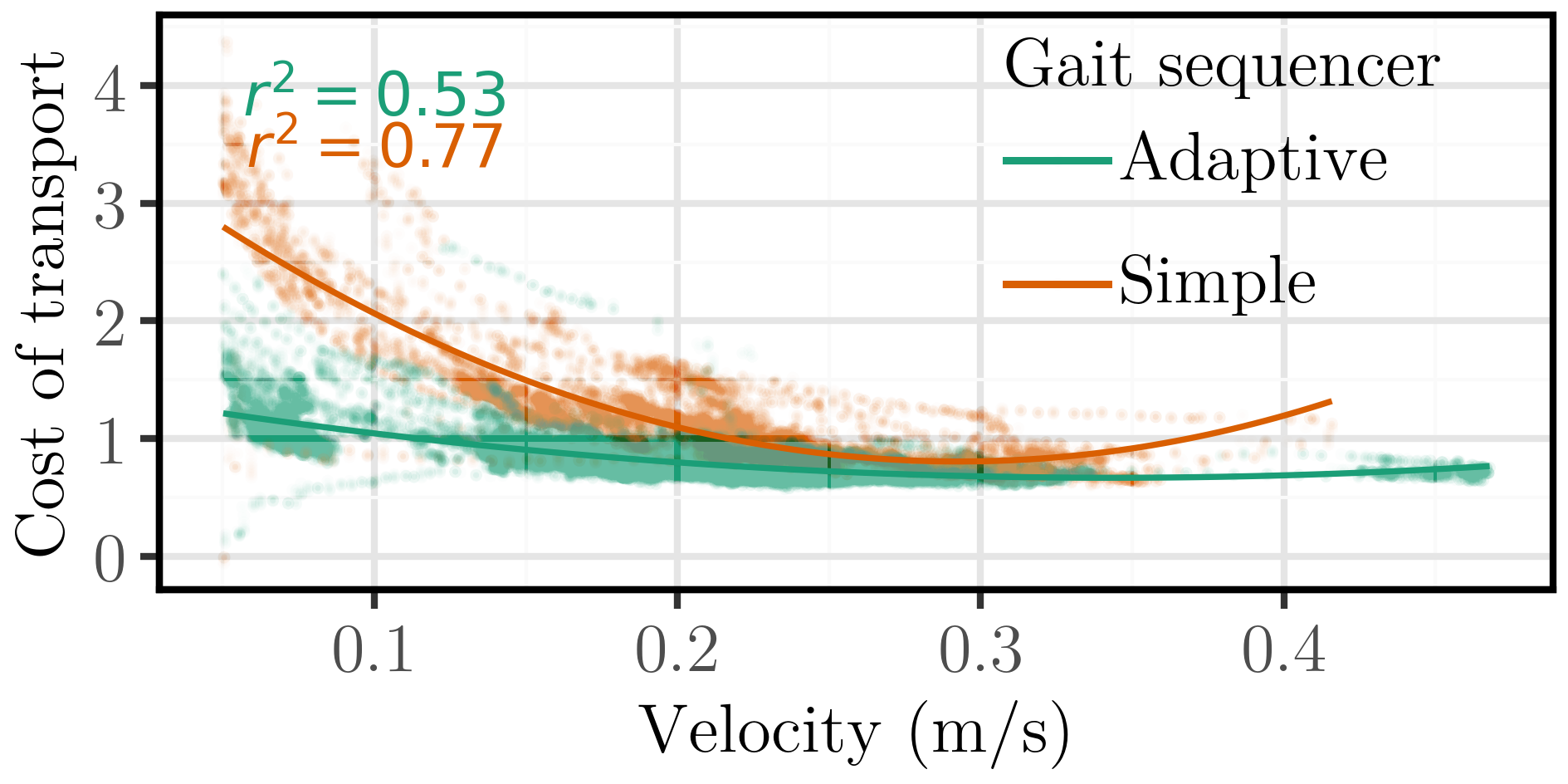
该框架在两个四足机器人平台(ALIENGO和ANYmal)上进行了验证,并在火山现场测试中成功行走超过700米。实验结果表明,该框架能够有效地应对地形和机器人参数的不确定性,实现鲁棒的运动控制。与传统的基于固定模型的控制方法相比,该框架在未知环境下的性能显著提升,能够适应不同的地形和任务需求。
🎯 应用场景
该研究成果可应用于行星探测、搜救、灾后救援等领域。通过提高四足机器人在复杂未知环境中的自主导航能力,可以使其在人类难以到达的区域执行任务,例如勘探资源、搜寻幸存者、评估灾情等。此外,该技术还可以推广到其他类型的腿式机器人,例如双足机器人和多足机器人。
📄 摘要(原文)
Planetary exploration missions require robots capable of navigating extreme and unknown environments. While wheeled rovers have dominated past missions, their mobility is limited to traversable surfaces. Legged robots, especially quadrupeds, can overcome these limitations by handling uneven, obstacle-rich, and deformable terrains. However, deploying such robots in unknown conditions is challenging due to the need for environment-specific control, which is infeasible when terrain and robot parameters are uncertain. This work presents a modular control framework that combines model-based dynamic control with online model adaptation and adaptive footstep planning to address uncertainties in both robot and terrain properties. The framework includes state estimation for quadrupeds with and without contact sensing, supports runtime reconfiguration, and is integrated into ROS 2 with open-source availability. Its performance was validated on two quadruped platforms, multiple hardware architectures, and in a volcano field test, where the robot walked over 700 m.