RAPID Hand Prototype: Design of an Affordable, Fully-Actuated Biomimetic Hand for Dexterous Teleoperation
作者: Zhaoliang Wan, Zida Zhou, Zetong Bi, Zehui Yang, Hao Ding, Hui Cheng
分类: cs.RO
发布日期: 2025-10-19 (更新: 2025-10-21)
备注: Accepted by IROS2025
💡 一句话要点
RAPID Hand:低成本、全驱动仿生手,用于灵巧遥操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 灵巧手 遥操作 机器人学习 仿生设计 低成本 全驱动 3D打印
📋 核心要点
- 现有灵巧手价格昂贵,限制了在“从演示中学习”范式中获取大规模机器人数据。
- RAPID Hand采用拟人驱动和传输方案,优化电机布局和结构,实现低成本和高灵巧性。
- 实验表明,RAPID Hand在多指取物、舀勺处理和钢琴演奏等任务中表现出良好的遥操作性能。
📝 摘要(中文)
本文旨在解决目前市场上价格适宜、全驱动五指灵巧手稀缺的问题,这对于在“从演示中学习”范式中收集大规模真实机器人数据至关重要。我们介绍了RAPID Hand的原型版本,这是首款低成本、20自由度(DoA)的灵巧手,它集成了新颖的拟人驱动和传输方案,并优化了电机布局和结构设计,以增强灵巧性。具体来说,RAPID Hand为非拇指手指设计了通用的指骨传输方案,并采用了全向拇指驱动机制。为了优先考虑经济性,该手采用了3D打印部件和定制齿轮,以便于更换和维修。我们通过定量指标和在灵巧遥操作系统中的定性测试来评估RAPID Hand的性能,该系统在三个具有挑战性的任务中进行了评估:多指取物、舀勺处理和类似人类的钢琴演奏。结果表明,RAPID Hand的全驱动20自由度设计在灵巧遥操作方面具有显著的潜力。
🔬 方法详解
问题定义:现有灵巧手普遍存在成本高昂的问题,这阻碍了其在机器人学习,特别是“从演示中学习”范式中的广泛应用。缺乏经济实惠的灵巧手限制了大规模真实机器人数据的收集,进而影响了相关算法的性能和泛化能力。此外,现有灵巧手在设计上可能存在驱动方式不够拟人化、维修更换困难等问题。
核心思路:RAPID Hand的核心思路是设计一款低成本、全驱动(20自由度)的仿人灵巧手,通过优化驱动和传输方案,以及采用易于制造和更换的部件,降低整体成本,同时保证足够的灵巧性。该设计旨在实现更自然、更高效的遥操作,并促进机器人学习研究。
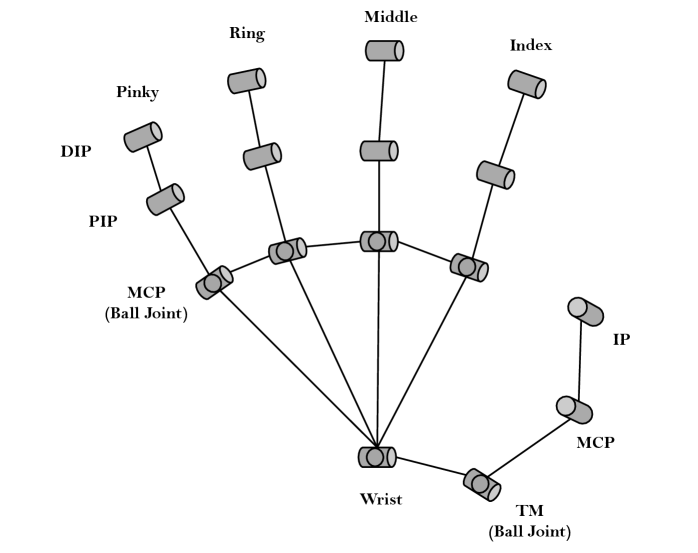
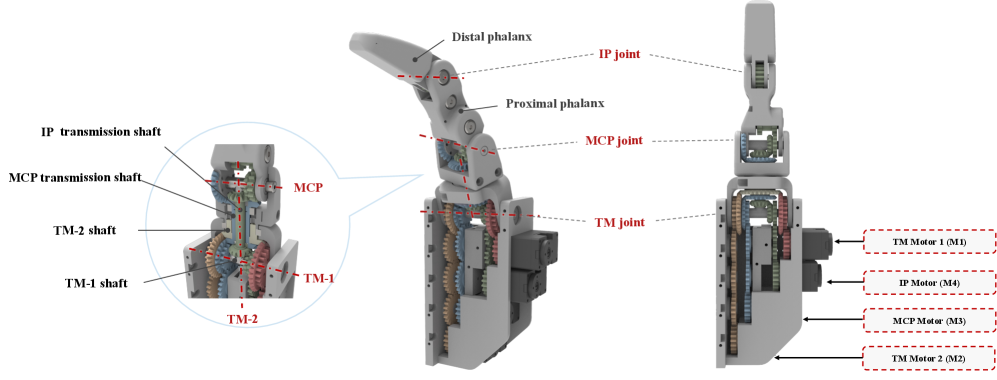
技术框架:RAPID Hand的整体架构包括:1) 拟人化的手指结构设计;2) 用于非拇指手指的通用指骨传输方案;3) 全向拇指驱动机制;4) 优化的电机布局;5) 基于3D打印部件和定制齿轮的低成本制造方案。该框架旨在实现高灵巧性、低成本和易维护性的平衡。
关键创新:RAPID Hand的关键创新在于其低成本和全驱动的结合。具体体现在:1) 采用通用的指骨传输方案,简化了非拇指手指的驱动结构;2) 设计了全向拇指驱动机制,增强了拇指的灵活性;3) 使用3D打印部件和定制齿轮,降低了制造成本,并方便了更换和维修。
关键设计:RAPID Hand的关键设计包括:1) 电机布局的优化,以减少手的整体尺寸和重量;2) 3D打印材料的选择,以保证强度和耐用性;3) 定制齿轮的设计,以实现高效的动力传输;4) 驱动方案的参数设置,以平衡速度和力矩。
🖼️ 关键图片

📊 实验亮点
RAPID Hand在多指取物、舀勺处理和钢琴演奏等遥操作任务中进行了评估。定性结果表明,该手能够完成复杂的灵巧操作。虽然论文中没有提供具体的定量性能数据,但作者强调了其全驱动设计在灵巧遥操作方面的潜力。
🎯 应用场景
RAPID Hand可应用于远程操作、机器人辅助医疗、工业自动化等领域。其低成本的特性使其能够被更广泛地应用于机器人学习和研究,促进相关算法的发展。此外,该设计也为其他低成本灵巧手的开发提供了参考。
📄 摘要(原文)
This paper addresses the scarcity of affordable, fully-actuated five-fingered hands for dexterous teleoperation, which is crucial for collecting large-scale real-robot data within the "Learning from Demonstrations" paradigm. We introduce the prototype version of the RAPID Hand, the first low-cost, 20-degree-of-actuation (DoA) dexterous hand that integrates a novel anthropomorphic actuation and transmission scheme with an optimized motor layout and structural design to enhance dexterity. Specifically, the RAPID Hand features a universal phalangeal transmission scheme for the non-thumb fingers and an omnidirectional thumb actuation mechanism. Prioritizing affordability, the hand employs 3D-printed parts combined with custom gears for easier replacement and repair. We assess the RAPID Hand's performance through quantitative metrics and qualitative testing in a dexterous teleoperation system, which is evaluated on three challenging tasks: multi-finger retrieval, ladle handling, and human-like piano playing. The results indicate that the RAPID Hand's fully actuated 20-DoF design holds significant promise for dexterous teleoperation.