Improving the performance of AI-powered Affordable Robotics for Assistive Tasks
作者: Dharunish Yugeswardeenoo
分类: cs.RO
发布日期: 2025-10-17
备注: 6 pages, 5 figures. Accepted to Conference on Robot Learning (CoRL 2025), Seoul, Korea
💡 一句话要点
提出基于模仿学习的低成本机器人臂,用于辅助任务并显著提升性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人辅助 模仿学习 低成本机器人 时间序列建模 Transformer 动作分割 辅助护理
📋 核心要点
- 现有机器人辅助解决方案成本高昂且需要专业知识,限制了其可及性,无法满足日益增长的辅助护理需求。
- 论文提出一种基于模仿学习的低成本机器人臂,通过Phased Action Chunking Transformer (PACT) 捕捉动作的时间依赖性。
- 实验结果表明,该系统在辅助任务中实现了超过90%的准确率,相比基线方法提升高达40%。
📝 摘要(中文)
本文提出了一种低成本的机器人臂,用于执行诸如喂食、清理溢出物和取药等辅助任务,旨在解决辅助护理人员短缺的问题。该系统采用模仿学习方法,从演示视频中学习,无需特定任务编程或手动标注。该机器人由六个舵机、双摄像头和3D打印夹爪组成。通过遥操作收集了50,000个视频帧,涵盖三个任务。论文提出了一种新颖的Phased Action Chunking Transformer (PACT),用于捕捉时间依赖关系和分割运动动态,以及一种时间集成(TE)方法,用于优化轨迹以提高准确性和平滑度。在五个模型尺寸和四种架构上进行了评估,经过十小时的真实世界测试,该系统实现了超过90%的任务准确率,比基线提高了高达40%。PACT在保持75%准确率的同时,实现了5倍的模型尺寸缩减。显著性分析表明系统依赖关键视觉线索,并且相位token梯度在关键轨迹时刻达到峰值,表明有效的时间推理。未来的工作将探索双臂操作和移动性,以扩展辅助能力。
🔬 方法详解
问题定义:论文旨在解决辅助护理领域护理人员短缺的问题,现有机器人解决方案成本高昂且需要专业知识,难以普及。因此,需要开发一种低成本、易于使用的机器人系统,能够执行常见的辅助任务,如喂食、清理和取药。现有方法通常依赖于复杂的编程或手动标注,限制了其灵活性和可扩展性。
核心思路:论文的核心思路是利用模仿学习,让机器人通过观察人类演示视频来学习执行任务。这种方法无需进行复杂的编程或手动标注,降低了使用门槛。通过学习视频中的动作序列,机器人可以模仿人类的行为,从而完成各种辅助任务。此外,论文还提出了PACT和TE方法,以提高学习效率和轨迹的准确性。
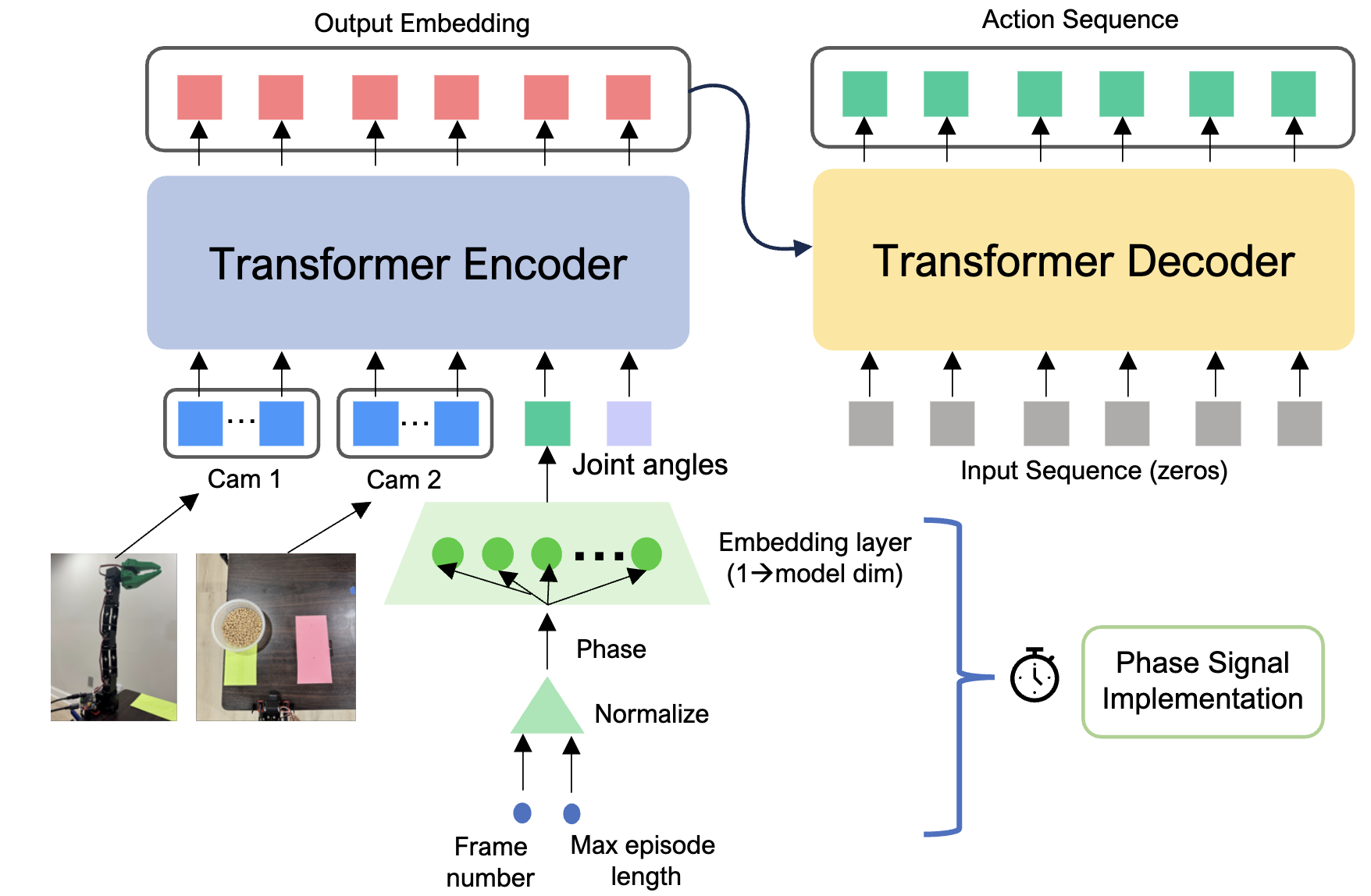
技术框架:该系统的整体框架包括数据采集、模型训练和机器人控制三个主要阶段。首先,通过遥操作收集人类演示视频,构建数据集。然后,使用PACT和TE方法训练模型,学习从视频帧到机器人动作的映射关系。最后,将训练好的模型部署到机器人上,实现自主执行辅助任务。机器人硬件包括六个舵机、双摄像头和3D打印夹爪。
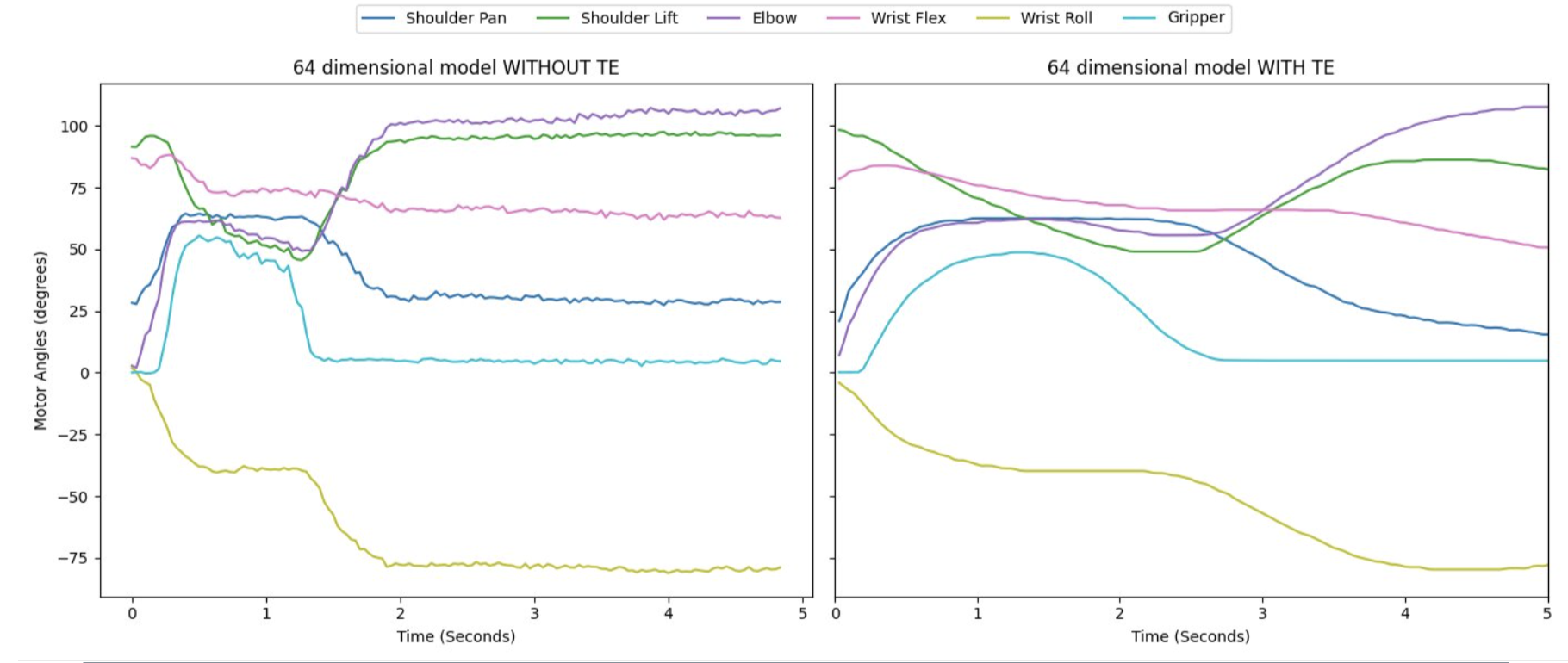
关键创新:论文的关键创新在于PACT模块和TE方法。PACT通过分阶段的动作块处理,能够有效地捕捉动作的时间依赖关系,并分割运动动态,从而提高学习效率和泛化能力。TE方法则通过时间集成,优化机器人轨迹,提高准确性和平滑度。PACT能够在保持较高准确率的同时,显著减小模型尺寸。
关键设计:PACT模块采用Transformer架构,并引入了相位token,用于表示动作的不同阶段。TE方法则通过加权平均多个时间步的预测结果,来平滑轨迹。损失函数包括模仿学习损失和正则化损失,用于约束模型的学习过程。具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
该系统在真实世界测试中取得了显著的成果,实现了超过90%的任务准确率,相比基线方法提升高达40%。PACT模块在保持75%准确率的同时,实现了5倍的模型尺寸缩减,表明其具有很高的效率。显著性分析表明,系统能够有效地利用关键视觉线索进行推理,相位token梯度在关键轨迹时刻达到峰值,验证了PACT模块的时间推理能力。
🎯 应用场景
该研究成果可应用于养老院、医院和家庭等场景,为老年人、残疾人和其他需要辅助护理的人群提供帮助。低成本的机器人臂可以执行各种辅助任务,减轻护理人员的负担,提高护理质量。未来,该技术有望扩展到更多领域,如康复训练、远程医疗等。
📄 摘要(原文)
By 2050, the global demand for assistive care is expected to reach 3.5 billion people, far outpacing the availability of human caregivers. Existing robotic solutions remain expensive and require technical expertise, limiting accessibility. This work introduces a low-cost robotic arm for assistive tasks such as feeding, cleaning spills, and fetching medicine. The system uses imitation learning from demonstration videos, requiring no task-specific programming or manual labeling. The robot consists of six servo motors, dual cameras, and 3D-printed grippers. Data collection via teleoperation with a leader arm yielded 50,000 video frames across the three tasks. A novel Phased Action Chunking Transformer (PACT) captures temporal dependencies and segments motion dynamics, while a Temporal Ensemble (TE) method refines trajectories to improve accuracy and smoothness. Evaluated across five model sizes and four architectures, with ten hours of real-world testing, the system achieved over 90% task accuracy, up to 40% higher than baselines. PACT enabled a 5x model size reduction while maintaining 75% accuracy. Saliency analysis showed reliance on key visual cues, and phase token gradients peaked at critical trajectory moments, indicating effective temporal reasoning. Future work will explore bimanual manipulation and mobility for expanded assistive capabilities.