Towards Automated Chicken Deboning via Learning-based Dynamically-Adaptive 6-DoF Multi-Material Cutting
作者: Zhaodong Yang, Ai-Ping Hu, Harish Ravichandar
分类: cs.RO
发布日期: 2025-10-17
备注: 8 Pages, 8 figures
💡 一句话要点
提出基于学习的动态自适应六自由度多材质切割方法,实现自动化鸡肩剔骨
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 自动化剔骨 强化学习 力反馈控制 多材质切割 机器人切割
📋 核心要点
- 鸡肩剔骨自动化面临挑战,现有方法难以在部分遮挡、可变形的多材质关节中实现精确切割,易损伤骨骼。
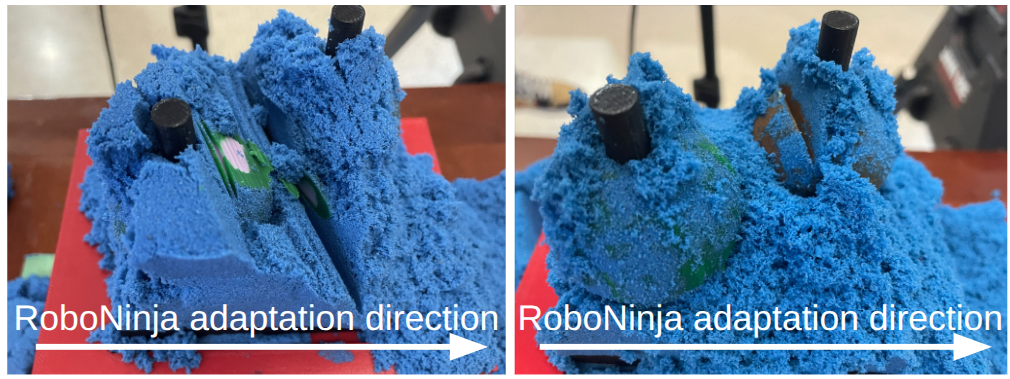
- 提出基于强化学习的力反馈切割策略,通过动态调整刀具轨迹,实现六自由度精确控制,避免骨骼接触。
- 构建模拟器和物理测试平台,实现高效训练和评估。实验表明,该策略在真实鸡肩剔骨中显著提升成功率和安全性。
📝 摘要(中文)
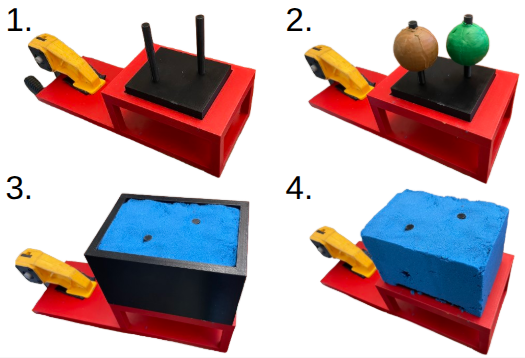
本文旨在实现自动化鸡肩剔骨,通过精确的六自由度切割穿过部分遮挡、可变形的多材质关节。由于接触骨骼会带来严重的安全风险,本研究在系统和算法层面均做出了贡献,训练并部署了一种反应式力反馈切割策略,该策略动态调整标称轨迹,并实现完全六自由度刀具控制,以穿过狭窄的关节间隙,同时避免与骨骼接触。首先,我们引入了一个开源的定制多材质切割模拟器,该模拟器对耦合、断裂和切割力进行建模,并支持强化学习,从而实现高效训练和快速原型设计。其次,我们设计了一个可重复使用的物理测试平台,用于模拟鸡肩:两个具有可控姿态的刚性“骨骼”球体嵌入在较软的块中,从而实现严格且可重复的评估,同时保留目标问题的基本多材质特性。第三,我们训练并部署了一个残差强化学习策略,采用离散化的力观测和领域随机化,实现了鲁棒的零样本模拟到真实迁移,并首次演示了学习策略在真实鸡肩上的剔骨。在模拟器、物理测试平台和真实鸡肩上的实验表明,我们学习的策略能够可靠地导航关节间隙,并减少不必要的骨骼/软骨接触,在成功率和避免骨骼接触方面,比现有的开环切割基线提高了4倍。我们的结果还表明,力反馈对于安全有效的多材质切割是必不可少的。
🔬 方法详解
问题定义:鸡肩剔骨是一个复杂的多材质切割问题,需要精确控制刀具在狭窄的关节间隙中穿行,同时避免接触骨骼。现有方法,如开环切割,难以适应鸡肩的形状变化和不确定性,容易造成骨骼损伤,效率低下。因此,需要一种能够根据实时反馈动态调整切割轨迹的方法。
核心思路:本研究的核心思路是利用强化学习训练一个能够根据力反馈动态调整切割轨迹的策略。通过力反馈,策略可以感知刀具与鸡肩的交互,并根据实时情况调整刀具的姿态和位置,从而避免骨骼接触,提高切割的准确性和效率。这种方法能够适应鸡肩的形状变化和不确定性,实现更安全、更高效的自动化剔骨。
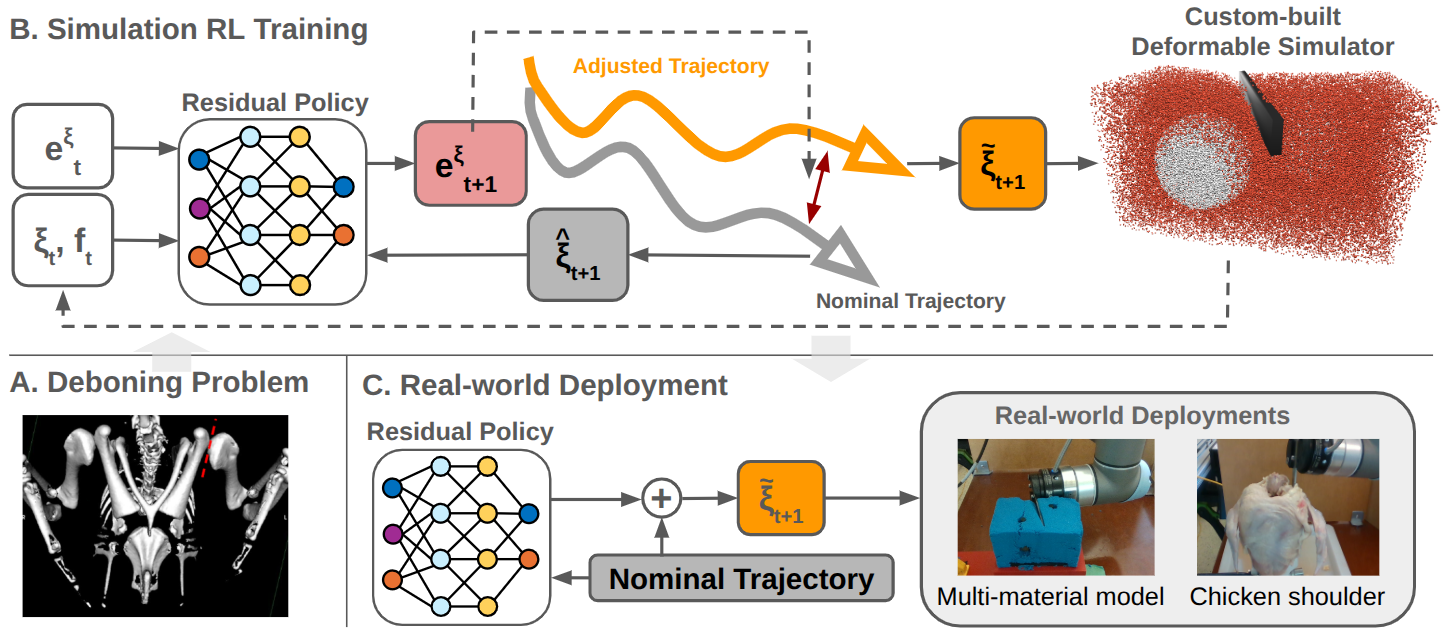
技术框架:该方法的技术框架主要包括以下几个模块: 1. 多材质切割模拟器:用于生成训练数据,模拟刀具与鸡肩的交互,包括耦合、断裂和切割力。 2. 物理测试平台:用于验证策略的有效性和鲁棒性,模拟真实鸡肩的环境。 3. 强化学习策略:用于学习最佳的切割轨迹,根据力反馈动态调整刀具的姿态和位置。 4. 力反馈系统:用于实时感知刀具与鸡肩的交互力,为策略提供反馈信息。
关键创新:该研究的关键创新点在于: 1. 基于强化学习的力反馈切割策略:能够根据实时力反馈动态调整切割轨迹,避免骨骼接触,提高切割的准确性和效率。 2. 多材质切割模拟器:能够模拟刀具与鸡肩的复杂交互,为强化学习提供高质量的训练数据。 3. 物理测试平台:能够模拟真实鸡肩的环境,验证策略的有效性和鲁棒性。
关键设计:该研究的关键设计包括: 1. 残差强化学习策略:使用残差网络结构,加速策略的收敛。 2. 离散化的力观测:将力反馈信息离散化,降低策略的复杂度。 3. 领域随机化:在模拟器中对鸡肩的形状、大小和材质进行随机化,提高策略的泛化能力。 4. 奖励函数设计:设计合理的奖励函数,引导策略学习最佳的切割轨迹。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在模拟器、物理测试平台和真实鸡肩上均取得了良好的效果。在真实鸡肩剔骨实验中,该策略的成功率和避免骨骼接触的比例比现有的开环切割基线提高了4倍。这表明该方法能够有效地解决鸡肩剔骨的自动化问题,具有很高的实用价值。
🎯 应用场景
该研究成果可应用于家禽加工业的自动化生产线,提高鸡肉产品的生产效率和质量,降低人工成本和安全风险。此外,该技术也可推广到其他类似的多材质切割场景,如肉类加工、水果采摘等。未来,结合更先进的感知和控制技术,有望实现更智能、更灵活的自动化切割系统。
📄 摘要(原文)
Automating chicken shoulder deboning requires precise 6-DoF cutting through a partially occluded, deformable, multi-material joint, since contact with the bones presents serious health and safety risks. Our work makes both systems-level and algorithmic contributions to train and deploy a reactive force-feedback cutting policy that dynamically adapts a nominal trajectory and enables full 6-DoF knife control to traverse the narrow joint gap while avoiding contact with the bones. First, we introduce an open-source custom-built simulator for multi-material cutting that models coupling, fracture, and cutting forces, and supports reinforcement learning, enabling efficient training and rapid prototyping. Second, we design a reusable physical testbed to emulate the chicken shoulder: two rigid "bone" spheres with controllable pose embedded in a softer block, enabling rigorous and repeatable evaluation while preserving essential multi-material characteristics of the target problem. Third, we train and deploy a residual RL policy, with discretized force observations and domain randomization, enabling robust zero-shot sim-to-real transfer and the first demonstration of a learned policy that debones a real chicken shoulder. Our experiments in our simulator, on our physical testbed, and on real chicken shoulders show that our learned policy reliably navigates the joint gap and reduces undesired bone/cartilage contact, resulting in up to a 4x improvement over existing open-loop cutting baselines in terms of success rate and bone avoidance. Our results also illustrate the necessity of force feedback for safe and effective multi-material cutting. The project website is at https://sites.google.com/view/chickendeboning-2026.