Traversability-aware Consistent Situational Graphs for Indoor Localization and Mapping
作者: Jeewon Kim, Minho Oh, Hyun Myung
分类: cs.RO
发布日期: 2025-10-17
备注: Accepted by RiTA 2024
💡 一句话要点
提出可通行性感知的场景图构建方法,提升室内定位与地图构建一致性。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 场景图 室内定位 地图构建 可通行性分析 房间分割
📋 核心要点
- 现有场景图方法在室内环境分割中,受视角和传感器限制,房间识别一致性差,影响定位和地图构建。
- 提出一种可通行性感知的房间分割方法,利用机器人与环境的交互信息,提升房间分割的语义一致性。
- 实验表明,该方法提高了同一房间的重检测频率,并降低了位姿图优化的计算时间。
📝 摘要(中文)
本文提出了一种可通行性感知的房间分割方法,用于构建一致的室内场景图,以提升机器人定位和地图构建的性能。现有的场景图方法在分割空间特征时,由于视角变化和传感器视野限制,难以持续识别房间。例如,实时方法常将大房间过度分割成无用的空间,而基于体素的方法在复杂环境中容易欠分割,导致错误的约束。本文方法考虑了机器人与环境的交互,利用可通行性信息增强语义一致性和计算效率,并通过实验验证了在重复路径上的房间重检测频率和优化时间方面的性能提升。
🔬 方法详解
问题定义:现有基于场景图的室内定位与地图构建方法,在房间分割方面存在不足。实时方法容易过度分割大房间,而基于体素的方法在复杂、非完全封闭的空间中容易欠分割。这些问题导致构建的场景图不准确,影响位姿图优化的效果,进而降低定位和地图构建的精度。
核心思路:论文的核心思路是引入可通行性信息,指导房间分割。通过考虑机器人或人类在环境中的可通行区域,避免将可通行区域分割成多个房间,或者将多个可通行区域合并成一个房间。这种方法能够更准确地反映房间的实际结构和功能,从而提高场景图的质量。
技术框架:该方法首先利用传感器数据(例如RGB-D图像或激光雷达点云)构建环境的三维地图。然后,基于地图进行可通行性分析,确定机器人或人类可以自由移动的区域。接下来,结合可通行性信息和传统的房间分割算法(例如基于体素或基于图的方法),对环境进行房间分割。最后,将分割结果用于构建场景图,并进行位姿图优化。
关键创新:该方法最重要的创新点在于将可通行性信息融入到房间分割过程中。传统方法主要依赖于几何特征或语义信息进行分割,而忽略了环境的可通行性。通过引入可通行性信息,该方法能够更准确地识别房间,并构建更符合实际情况的场景图。
关键设计:论文中可能涉及的关键设计包括:1) 可通行性分析的具体算法,例如基于栅格地图或导航网格的方法;2) 如何将可通行性信息与传统的房间分割算法相结合,例如通过修改分割算法的损失函数或约束条件;3) 如何利用分割结果构建场景图,例如定义节点和边的类型和属性。
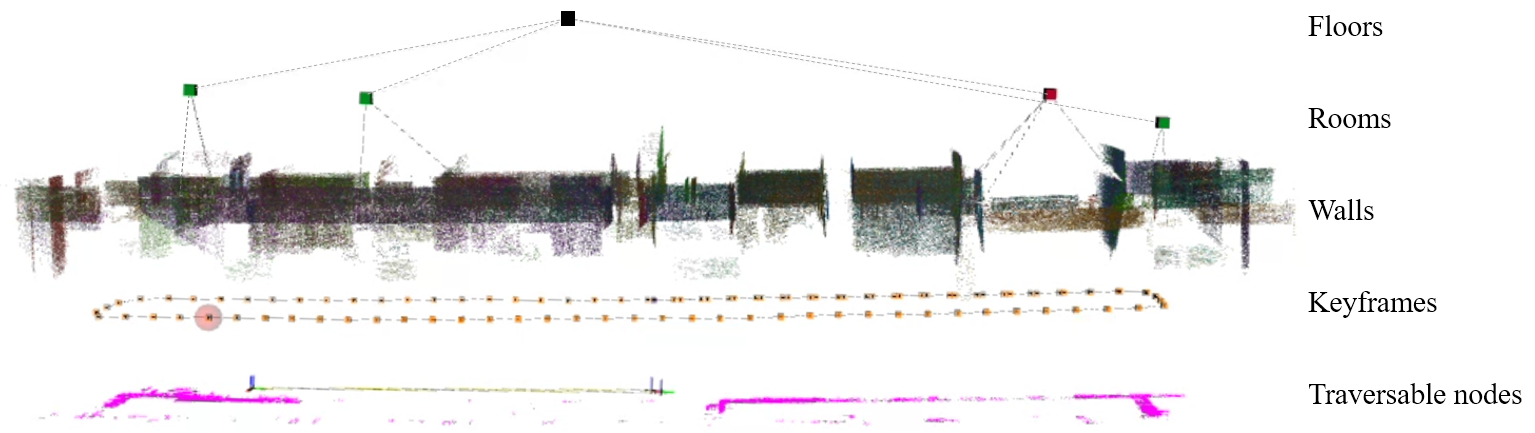
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了所提方法的有效性。实验结果表明,该方法能够提高同一房间的重检测频率,这意味着该方法能够更稳定地识别房间。此外,该方法还能够降低位姿图优化的计算时间,这意味着该方法能够更高效地构建场景图。具体的性能数据和提升幅度需要在论文中查找。
🎯 应用场景
该研究成果可应用于室内服务机器人、自动驾驶、虚拟现实和增强现实等领域。通过构建更准确的室内地图,机器人可以更好地进行导航、避障和任务规划。在虚拟现实和增强现实应用中,该方法可以提供更逼真的环境模型,提升用户体验。此外,该方法还可以用于智能家居和智慧楼宇等领域,实现更智能化的环境感知和控制。
📄 摘要(原文)
Scene graphs enhance 3D mapping capabilities in robotics by understanding the relationships between different spatial elements, such as rooms and objects. Recent research extends scene graphs to hierarchical layers, adding and leveraging constraints across these levels. This approach is tightly integrated with pose-graph optimization, improving both localization and mapping accuracy simultaneously. However, when segmenting spatial characteristics, consistently recognizing rooms becomes challenging due to variations in viewpoints and limited field of view (FOV) of sensors. For example, existing real-time approaches often over-segment large rooms into smaller, non-functional spaces that are not useful for localization and mapping due to the time-dependent method. Conversely, their voxel-based room segmentation method often under-segment in complex cases like not fully enclosed 3D space that are non-traversable for ground robots or humans, leading to false constraints in pose-graph optimization. We propose a traversability-aware room segmentation method that considers the interaction between robots and surroundings, with consistent feasibility of traversability information. This enhances both the semantic coherence and computational efficiency of pose-graph optimization. Improved performance is demonstrated through the re-detection frequency of the same rooms in a dataset involving repeated traversals of the same space along the same path, as well as the optimization time consumption.